Matrix- und Vektoroperationen in MQL5

Spezielle Datentypen - Matrizen und Vektoren - wurden der Sprache MQL5 hinzugefügt, um eine große Klasse von mathematischen Problemen zu lösen. Die neuen Typen bieten integrierte Methoden zur Erstellung von prägnantem und verständlichem Code, der der mathematischen Notation nahe kommt. In diesem Artikel finden Sie eine kurze Beschreibung der eingebauten Methoden aus dem Hilfeabschnitt Matrix- und Vektormethoden.
Inhalt
- Matrix- und Vektortypen
- Erstellung und Initialisierung
- Kopieren von Matrizen und Feldern
- Kopieren von Zeitreihen in Matrizen oder Vektoren
- Matrix- und Vektoroperationen
- Manipulationen
- Produkte
- Transformationen
- Statistik
- Eigenschaften
- Lösen von Gleichungen
- Methoden des maschinellen Lernens
- Verbesserungen in OpenCL
- Die Zukunft von MQL5 im maschinellen Lernen
Jede Programmiersprache bietet Array-Datentypen, die Gruppen von numerischen Variablen speichern, darunter int, double und andere. Auf Array-Elemente wird über einen Index zugegriffen, was Array-Operationen mit Schleifen ermöglicht. Am häufigsten werden eindimensionale und zweidimensionale Arrays verwendet:
int a[50]; // Eindimensionales Array mit 50 Ganzzahlen double m[7][50]; // Zweidimensionales Array mit 7 Unterarrays, diejeweils aus 50 Ganzzahlen bestehen MyTime t[100]; // Array mit Elementen vom Typ MyTime
Die Fähigkeiten von Arrays reichen in der Regel für relativ einfache Aufgaben im Zusammenhang mit der Datenspeicherung und -verarbeitung aus. Wenn es jedoch um komplexe mathematische Probleme geht, wird die Arbeit mit Arrays aufgrund der großen Anzahl verschachtelter Schleifen sowohl für die Programmierung als auch für das Lesen des Codes schwierig. Selbst die einfachsten Operationen der linearen Algebra erfordern eine exzessive Kodierung und ein gutes Verständnis der Mathematik.
Moderne Datentechnologien wie maschinelles Lernen, neuronale Netze und 3D-Grafiken nutzen in großem Umfang Lösungen der linearen Algebra, die mit den Konzepten von Vektoren und Matrizen verbunden sind. Um Operationen mit solchen Objekten zu erleichtern, bietet MQL5 spezielle Datentypen: Matrizen und Vektoren. Die neuen Typen eliminieren viele Routineprogrammiervorgänge und verbessern die Codequalität.
Matrix- und Vektortypen
Kurz gesagt, ein Vektor ist ein eindimensionales Array vom Typ double, und eine Matrix ist ein zweidimensionales Array vom Typ double. Vektoren können vertikal und horizontal sein; sie werden jedoch in MQL5 nicht getrennt.
Eine Matrix kann als ein Array von horizontalen Vektoren dargestellt werden, wobei der erste Index die Zeilennummer und der zweite Index die Spaltennummer ist.
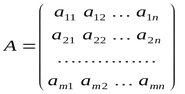
Die Nummerierung der Zeilen und Spalten beginnt bei 0, ähnlich wie bei Arrays.
Neben den Typen „matrix“ und „vector“, die Daten vom Typ double enthalten, gibt es vier weitere Typen für Operationen mit den entsprechenden Datentypen:
- matrixf — eine Matrix mit float-Elementen.
- matrixc — eine Matrix mit complex-Elementen
- vectorf — ein Vektor mit Float-Elementen
- vectorc — ein Vektor mit komplexen Elementen
Zum Zeitpunkt der Erstellung dieses Artikels ist die Arbeit an den Typen matrixc und vectorc noch nicht abgeschlossen, sodass es noch nicht möglich ist, diese Typen in integrierten Methoden zu verwenden.
Template-Funktionen unterstützen Notationen wie matrix<double>, matrix<float>, vector<double>, vector<float> anstelle der entsprechenden Typen.
vectorf v_f1= {0, 1, 2, 3,}; vector<float> v_f2=v_f1; Print("v_f2 = ", v_f2); /* v_f2 = [0,1,2,3] */
Erstellung und Initialisierung
Matrix- und Vektormethoden werden je nach ihrem Zweck in neun Kategorien unterteilt. Es gibt mehrere Möglichkeiten, Matrizen und Vektoren zu deklarieren und zu initialisieren.
Die einfachste Erstellungsmethode ist die Deklaration ohne Größenangabe, d.h. ohne Speicherzuweisung für die Daten. Hier schreiben wir nur den Datentyp und den Variablennamen:
matrix matrix_a; // Matrix des Typs double matrix<double> matrix_a1; // eine andere Art, eine Doppelmatrix zu deklarieren, geeignet für die Verwendung in Vorlagen matrix<float> matrix_a3; // Matrix des Typs float vector vector_a; // Vektor des Typs double vector<double> vector_a1; // eine andere Schreibweise zur Erstellung eines Vektors mit dem Typ double vector<float> vector_a3; // Vektor des Typs float
Anschließend können Sie die Größe der erstellten Objekte ändern und sie mit den gewünschten Werten füllen. Sie können auch in integrierten Matrixmethoden verwendet werden, um Berechnungsergebnisse zu erhalten.
Eine Matrix oder ein Vektor kann mit der angegebenen Größe deklariert werden, wobei Speicher für die Daten zugewiesen, aber nichts initialisiert wird. Hier geben Sie nach dem Variablennamen die Größe(n) in Klammern an:
matrix matrix_a(128,128); // die Parameter können entweder Konstanten sein matrix<double> matrix_a1(InpRows,InpCols); // oder Variablen matrix<float> matrix_a3(InpRows,1); // analog zu einem vertikalen Vektor vector vector_a(256); vector<double> vector_a1(InpSize); vector<float> vector_a3(InpSize+16); // der Ausdruck kann als Parameter verwendet werden
Die dritte Möglichkeit, Objekte zu erstellen, ist die Deklaration mit Initialisierung. In diesem Fall werden die Matrix- und Vektorgrößen durch die in geschweiften Klammern angegebene Initialisierungssequenz bestimmt:
matrix matrix_a={{0.1,0.2,0.3},{0.4,0.5,0.6}}; matrix<double> matrix_a1=matrix_a; // die Matrizen müssen vom gleichen Typ sein matrix<float> matrix_a3={{1,2},{3,4}}; vector vector_a={-5,-4,-3,-2,-1,0,1,2,3,4,5}; vector<double> vector_a1={1,5,2.4,3.3}; vector<float> vector_a3=vector_a2; // die Vektoren müssen vom gleichen Typ sein
Es gibt auch statische Methoden zur Erstellung von Matrizen und Vektoren der angegebenen Größe, die auf eine bestimmte Weise initialisiert werden:
matrix matrix_a =matrix::Eye(4,5,1); matrix<double> matrix_a1=matrix::Full(3,4,M_PI); matrixf matrix_a2=matrixf::Identity(5,5); matrixf<float> matrix_a3=matrixf::Ones(5,5); matrix matrix_a4=matrix::Tri(4,5,-1); vector vector_a =vector::Ones(256); vectorf vector_a1=vector<float>::Zeros(16); vector<float> vector_a2=vectorf::Full(128,float_value);
Darüber hinaus gibt es nicht-statische Methoden zur Initialisierung einer Matrix oder eines Vektors mit den angegebenen Werten — Init und Fill:
matrix m(2, 2); m.Fill(10); Print("matrix m \n", m); /* matrix m [[10,10] [10,10]] */ m.Init(4, 6); Print("matrix m \n", m); /* matrix m [[10,10,10,10,0.0078125,32.00000762939453] [0,0,0,0,0,0] [0,0,0,0,0,0] [0,0,0,0,0,0]] */
In diesem Beispiel haben wir die Init-Methode verwendet, um die Größe einer bereits initialisierten Matrix zu ändern, wodurch alle neuen Elemente mit Zufallswerten gefüllt wurden.
Ein wichtiger Vorteil der Init-Methode ist die Möglichkeit, eine Initialisierungsfunktion in Parametern anzugeben, um Matrix-/Vektor-Elemente gemäß dieser Regel zu füllen. Zum Beispiel:
void OnStart() { //--- matrix init(3, 6, MatrixSetValues); Print("init = \n", init); /* Ausführungsergebnis: Init [[1,2,4,8,16,32] [64,128,256,512,1024,2048] [4096,8192,16384,32768,65536,131072]] */ } //+------------------------------------------------------------------+ //| Füllt die Matrix mit Potenzen einer Zahl | //+------------------------------------------------------------------+ void MatrixSetValues(matrix& m, double initial=1) { double value=initial; for(ulong r=0; r<m.Rows(); r++) { for(ulong c=0; c<m.Cols(); c++) { m[r][c]=value; value*=2; } } }
Kopieren von Matrizen und Feldern
Matrizen und Vektoren können mit der Methode Copy kopiert werden. Eine einfachere und vertrautere Art, diese Datentypen zu kopieren, ist jedoch die Verwendung des Zuweisungsoperators „=“. Sie können auch die Methode „Assign“ zum Kopieren verwenden.
//--- Kopieren von Matrizen matrix a= {{2, 2}, {3, 3}, {4, 4}}; matrix b=a+2; matrix c; Print("matrix a \n", a); Print("matrix b \n", b); c.Assign(b); Print("matrix c \n", c); /* matrix a [[2,2] [3,3] [4,4]] matrix b [[4,4] [5,5] [6,6]] matrix c [[4,4] [5,5] [6,6]] */
Der Unterschied zwischen Assign und Copy besteht darin, dass es sowohl für Matrizen als auch für Arrays verwendet werden kann. Das folgende Beispiel zeigt das Kopieren des Integer-Arrays int_arr in eine double-Matrix. Die resultierende Matrix passt sich automatisch an die Größe des kopierten Arrays an.
//--- Kopieren eines Arrays in eine Matrix matrix double_matrix=matrix::Full(2,10,3.14); Print("double_matrix before Assign() \n", double_matrix); int int_arr[5][5]= {{1, 2}, {3, 4}, {5, 6}}; Print("int_arr: "); ArrayPrint(int_arr); double_matrix.Assign(int_arr); Print("double_matrix after Assign(int_arr) \n", double_matrix); /* double_matrix before Assign() [[3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14] [3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14]] int_arr: [,0][,1][,2][,3][,4] [0,] 1 2 0 0 0 [1,] 3 4 0 0 0 [2,] 5 6 0 0 0 [3,] 0 0 0 0 0 [4,] 0 0 0 0 0 double_matrix after Assign(int_arr) [[1,2,0,0,0] [3,4,0,0,0] [5,6,0,0,0] [0,0,0,0,0] [0,0,0,0,0]] */ }
Die Methode Assign ermöglicht einen nahtlosen Übergang von Arrays zu Matrizen mit automatischer Größen- und Typzuweisung.
Kopieren von Zeitreihen in Matrizen oder Vektoren
Die Analyse von Preischarts setzt Operationen mit Strukturarrays MqlRates voraus. MQL5 bietet eine neue Methode für die Arbeit mit solchen Preisdatenstrukturen.
Die Methode CopyRates kopiert historische Datenreihen der Struktur MqlRates direkt in eine Matrix oder einen Vektor. So können Sie vermeiden, dass Sie die benötigten Zeitreihen den entsprechenden Arrays zuweisen müssen, indem Sie Funktionen aus dem Abschnitt Zeitreihen und Indikatorenzugriff verwenden. Es ist auch nicht nötig, sie in eine Matrix oder einen Vektor zu übertragen. Mit der Methode CopyRates können Sie mit nur einem Aufruf Kurse einer Matrix oder einem Vektor zuweisen. Betrachten wir ein Beispiel für die Berechnung einer Korrelationsmatrix für eine Liste von Symbolen: Berechnen wir diese Werte mit zwei verschiedenen Methoden und vergleichen wir die Ergebnisse.
input int InBars=100; input ENUM_TIMEFRAMES InTF=PERIOD_H1; //+------------------------------------------------------------------+ //| Skript Programm Start Funktion | //+------------------------------------------------------------------+ void OnStart() { //--- Liste der Symbole für die Berechnung string symbols[]= {"EURUSD", "GBPUSD", "USDJPY", "USDCAD", "USDCHF"}; int size=ArraySize(symbols); //--- Matrix und Vektor zur Aufnahme der Schlusskurse matrix rates(InBars, size); vector close; for(int i=0; i<size; i++) { //--- Schlusskurse in einen Vektor umwandeln if(close.CopyRates(symbols[i], InTF, COPY_RATES_CLOSE, 1, InBars)) { //--- Einfügen des Vektors in die Zeitreihenmatrix rates.Col(close, i); PrintFormat("%d. %s: %d Close prices were added to matrix", i+1, symbols[i], close.Size()); //--- Ausgabe der ersten 20 Vektorwerte zur Fehlersuche int digits=(int)SymbolInfoInteger(symbols[i], SYMBOL_DIGITS); Print(VectorToString(close, 20, digits)); } else { Print("vector.CopyRates(%d,COPY_RATES_CLOSE) failed. Error ", symbols[i], GetLastError()); return; } } /* 1. EURUSD: 100 Schlusskurse wurden in die Matrix aufgenommen 0.99561 0.99550 0.99674 0.99855 0.99695 0.99555 0.99732 1.00305 1.00121 1.069 0.99936 1.027 1.00130 1.00129 1.00123 1.00201 1.00222 1.00111 1.079 1.030 ... 2. GBPUSD: 100 Schlusskurse wurden in die Matrix aufgenommen 1.13733 1.13708 1.13777 1.14045 1.13985 1.13783 1.13945 1.14315 1.14172 1.13974 1.13868 1.14116 1.14239 1.14230 1.14160 1.14281 1.14338 1.14242 1.14147 1.14069 ... 3. USDJPY: 100 Schlusskurse wurden in die Matrix aufgenommen 143.451 143.356 143.310 143.202 143.079 143.294 143.146 142.963 143.039 143.032 143.039 142.957 142.904 142.956 142.920 142.837 142.756 142.928 143.130 143.069 ... 4. USDCAD: 100 Schlusskurse wurden in die Matrix aufgenommen 1.32840 1.32877 1.32838 1.32660 1.32780 1.33068 1.33001 1.32798 1.32730 1.32782 1.32951 1.32868 1.32716 1.32663 1.32629 1.32614 1.32586 1.32578 1.32650 1.32789 ... 5. USDCHF: 100 Schlusskurse wurden in die Matrix aufgenommen 0.96395 0.96440 0.96315 0.96161 0.96197 0.96337 0.96358 0.96228 0.96474 0.96529 0.96529 0.96502 0.96463 0.96429 0.96378 0.96377 0.96314 0.96428 0.96483 0.96509 ... */ //--- Erstellung einer Matrix der Korrelationen zwischen den Symbolen matrix corr_from_vector=matrix::Zeros(size, size); Print("Compute pairwise correlation coefficients"); for(int i=0; i<size; i++) { for(int k=i; k<size; k++) { vector v1=rates.Col(i); vector v2=rates.Col(k); double coeff = v1.CorrCoef(v2); PrintFormat("corr(%s,%s) = %.3f", symbols[i], symbols[k], coeff); corr_from_vector[i][k]=coeff; } } Print("Correlation matrix on vectors: \n", corr_from_vector); /* Berechnung der paarweisen Korrelationskoeffizienten corr(EURUSD,EURUSD) = 1.000 corr(EURUSD,GBPUSD) = 0.974 corr(EURUSD,USDJPY) = -0.713 corr(EURUSD,USDCAD) = -0.950 corr(EURUSD,USDCHF) = -0,397 corr(GBPUSD,GBPUSD) = 1.000 corr(GBPUSD,USDJPY) = -0,744 corr(GBPUSD,USDCAD) = -0.953 corr(GBPUSD,USDCHF) = -0.362 corr(USDJPY,USDJPY) = 1.000 corr(USDJPY,USDCAD) = 0.736 corr(USDJPY,USDCHF) = 0.083 corr(USDCAD,USDCAD) = 1.000 corr(USDCAD,USDCHF) = 0.425 corr(USDCHF,USDCHF) = 1.000 Korrelationsmatrix für Vektoren: [[1,0.9736363791537366,-0.7126365191640618,-0.9503129578410202,-0.3968181226230434] [0,1,-0.7440448047501974,-0.9525190338388175,-0.3617774666815978] [0,0,1,0.7360546499847362,0.08314381248168941] [0,0,0,0.9999999999999999,0.4247042496841555] [0,0,0,0,1]] */ //--- nun wollen wir sehen, wie eine Korrelationsmatrix in einer Zeile berechnet werden kann matrix corr_from_matrix=rates.CorrCoef(false); // false bedeutet, dass die Vektoren in den Spalten der Matrix stehen Print("Korrelationsmatrix rates.CorrCoef(false): \n", corr_from_matrix.TriU()); //--- Vergleich der sich ergebenden Matrizen, um Diskrepanzen festzustellen Print("Anzahl der Diskrepanzfehler zwischen den Ergebnismatrizen?"); ulong errors=corr_from_vector.Compare(corr_from_matrix.TriU(), (float)1e-12); Print("corr_from_vector.Compare(corr_from_matrix,1e-12)=", errors); /* Correlation matrix rates.CorrCoef(false): [[1,0.9736363791537366,-0.7126365191640618,-0.9503129578410202,-0.3968181226230434] [0,1,-0.7440448047501974,-0.9525190338388175,-0.3617774666815978] [0,0,1,0.7360546499847362,0.08314381248168941] [0,0,0,1,0.4247042496841555] [0,0,0,0,1]] Anzahl der Diskrepanzfehler zwischen den Ergebnismatrizen? corr_from_vector.Compare(corr_from_matrix,1e-12)=0 */ //--- Erstellen einer gestalteten Ausgabe der Korrelationsmatrix Print("Ausgabe der Korrelationsmatrix mit Kopfzeilen"); string header=""; // Kopfzeile for(int i=0; i<size; i++) header+=" "+symbols[i]; Print(header); //--- jetzt die Zeilen for(int i=0; i<size; i++) { string line=symbols[i]+" "; line+=VectorToString(corr_from_vector.Row(i), size, 3, 8); Print(line); } /* Ausgabe der Korrelationsmatrix mit Kopfzeile EURUSD GBPUSD USDJPY USDCAD USDCHF EURUSD 1.0 0.974 -0.713 -0.950 -0.397 GBPUSD 0.0 1.0 -0.744 -0.953 -0.362 USDJPY 0.0 0.0 1.0 0.736 0.083 USDCAD 0.0 0.0 0.0 1.0 0.425 USDCHF 0.0 0.0 0.0 0.0 1.0 */ } //+------------------------------------------------------------------+ //| Rückgabe einer Zeichenkette mit Vektorwerten | //+------------------------------------------------------------------+ string VectorToString(const vector &v, int length=20, int digits=5, int width=8) { ulong size=(ulong)MathMin(20, v.Size()); //--- eine Zeichenkette zusammenstellen string line=""; for(ulong i=0; i<size; i++) { string value=DoubleToString(v[i], digits); StringReplace(value, ".000", ".0"); line+=Indent(width-StringLen(value))+value; } //--- Hinzufügen der Ergänzung, wenn die Vektorlänge die angegebene Größe überschreitet if(v.Size()>size) line+=" ..."; //--- return(line); } //+------------------------------------------------------------------+ //| Rückgabe einer Zeichenkette mit angegebener Leerzeichenzahl | //+------------------------------------------------------------------+ string Indent(int number) { string indent=""; for(int i=0; i<number; i++) indent+=" "; return(indent); }
Das Beispiel zeigt, wie verwendet werden kann:
- Mit CopyRates die Schlusskurse abrufen.
- Einfügen eines Vektors in eine Matrix mit der Methode Col.
- Berechnen des Korrelationskoeffizienten zwischen zwei Vektoren mit CorrCoef.
- Berechnen der Korrelationsmatrix über eine Matrix mit Wertvektoren mit CorrCoef.
- Rückgabe einer oberen Dreiecksmatrix mit Hilfe der Methode TriU.
- Vergleichen zweier Matrizen und Auffinden von Diskrepanzen mit Compare.
Matrix- und Vektoroperationen
Elementweise mathematische Operationen wie Addition, Subtraktion, Multiplikation und Division können mit Matrizen und Vektoren durchgeführt werden. Beide Objekte in solchen Operationen müssen vom gleichen Typ sein und die gleiche Größe haben. Jedes Element der Matrix oder des Vektors wirkt auf das entsprechende Element der zweiten Matrix oder des Vektors.
Sie können auch einen Skalar des entsprechenden Typs (double, float oder complex) als zweiten Term (Multiplikator, Subtrahend oder Divisor) verwenden. In diesem Fall wird jedes Element der Matrix oder des Vektors auf den angegebenen Skalarwert wirken.
matrix matrix_a={{0.1,0.2,0.3},{0.4,0.5,0.6}}; matrix matrix_b={{1,2,3},{4,5,6}}; matrix matrix_c1=matrix_a+matrix_b; matrix matrix_c2=matrix_b-matrix_a; matrix matrix_c3=matrix_a*matrix_b; // Hadamard product matrix matrix_c4=matrix_b/matrix_a; matrix_c1=matrix_a+1; matrix_c2=matrix_b-double_value; matrix_c3=matrix_a*M_PI; matrix_c4=matrix_b/0.1; //--- Operationen an Ort und Stelle sind möglich matrix_a+=matrix_b; matrix_a/=2;
Darüber hinaus können Matrizen und Vektoren als zweiter Parameter den meisten mathematischen Funktionen übergeben werden, darunter MathAbs, MathArccos, MathArcsin, MathArctan, MathCeil, MathCos, MathExp, MathFloor, MathLog, MathLog10, MathMod, MathPow, MathRound, MathSin, MathSqrt, MathTan, MathExpm1, MathLog1p, MathArccosh, MathArcsinh, MathArctanh, MathCosh, MathSinh, MathTanh. Solche Operationen implizieren eine elementweise Behandlung von Matrizen und Vektoren. Beispiel:
//--- matrix a= {{1, 4}, {9, 16}}; Print("matrix a=\n",a); a=MathSqrt(a); Print("MatrSqrt(a)=\n",a); /* matrix a= [[1,4] [9,16]] MatrSqrt(a)= [[1,2] [3,4]] */
Bei MathMod und MathPow kann das zweite Element entweder ein Skalar oder eine Matrix/ein Vektor mit der entsprechenden Größe sein.
matrix<T> mat1(128,128); matrix<T> mat3(mat1.Rows(),mat1.Cols()); ulong n,size=mat1.Rows()*mat1.Cols(); ... mat2=MathPow(mat1,(T)1.9); for(n=0; n<size; n++) { T res=MathPow(mat1.Flat(n),(T)1.9); if(res!=mat2.Flat(n)) errors++; } mat2=MathPow(mat1,mat3); for(n=0; n<size; n++) { T res=MathPow(mat1.Flat(n),mat3.Flat(n)); if(res!=mat2.Flat(n)) errors++; } ... vector<T> vec1(16384); vector<T> vec3(vec1.Size()); ulong n,size=vec1.Size(); ... vec2=MathPow(vec1,(T)1.9); for(n=0; n<size; n++) { T res=MathPow(vec1[n],(T)1.9); if(res!=vec2[n]) errors++; } vec2=MathPow(vec1,vec3); for(n=0; n<size; n++) { T res=MathPow(vec1[n],vec3[n]); if(res!=vec2[n]) errors++; }
Manipulationen
MQL5 unterstützt die folgenden grundlegenden Manipulationen von Matrizen und Vektoren, die keine Berechnungen erfordern:
- Transposition
- Extraktion von Zeilen, Spalten und Diagonalen
- Größenänderung und Umformung von Matrizen
- Vertauschen der angegebenen Zeilen und Spalten
- Kopieren in ein neues Objekt
- Vergleich von zwei Objekten
- Aufteilung einer Matrix in mehrere Submatrizen
- Sortieren
matrix a= {{0, 1, 2}, {3, 4, 5}}; Print("Matrix a \n", a); Print("a.Transpose() \n", a.Transpose()); /* matrix a [[0,1,2] [3,4,5]] a.Transpose() [[0,3] [1,4] [2,5]] */
Die folgenden Beispiele zeigen, wie eine Diagonale mit der Methode Diag festgelegt und extrahiert werden kann:
vector v1={1,2,3}; matrix m1; m1.Diag(v1); Print("m1\n",m1); /* m1 [[1,0,0] [0,2,0] [0,0,3]] m2 */ matrix m2; m2.Diag(v1,-1); Print("m2\n",m2); /* m2 [[0,0,0] [1,0,0] [0,2,0] [0,0,3]] */ matrix m3; m3.Diag(v1,1); Print("m3\n",m3); /* m3 [[0,1,0,0] [0,0,2,0] [0,0,0,3]] */ matrix m4=matrix::Full(4,5,9); m4.Diag(v1,1); Print("m4\n",m4); Print("diag -1 - ",m4.Diag(-1)); Print("diag 0 - ",m4.Diag()); Print("diag 1 - ",m4.Diag(1)); /* m4 [[9,1,9,9,9] [9,9,2,9,9] [9,9,9,3,9] [9,9,9,9,9]] diag -1 - [9,9,9] diag 0 - [9,9,9,9] diag 1 - [1,2,3,9] */
Changing a matrix size using the Reshape method:
matrix matrix_a={{1,2,3},{4,5,6},{7,8,9},{10,11,12}}; Print("matrix_a\n",matrix_a); /* matrix_a [[1,2,3] [4,5,6] [7,8,9] [10,11,12]] */ matrix_a.Reshape(2,6); Print("Reshape(2,6)\n",matrix_a); /* Reshape(2,6) [[1,2,3,4,5,6] [7,8,9,10,11,12]] */ matrix_a.Reshape(3,5); Print("Reshape(3,5)\n",matrix_a); /* Reshape(3,5) [[1,2,3,4,5] [6,7,8,9,10] [11,12,0,3,0]] */ matrix_a.Reshape(2,4); Print("Reshape(2,4)\n",matrix_a); /* Reshape(2,4) [[1,2,3,4] [5,6,7,8]] */
Beispiele für eine vertikale Aufteilung einer Matrix mit der Methode Vsplit:
matrix matrix_a={{ 1, 2, 3, 4, 5, 6}, { 7, 8, 9,10,11,12}, {13,14,15,16,17,18}}; matrix splitted[]; ulong parts[]={2,3}; matrix_a.Vsplit(2,splitted); for(uint i=0; i<splitted.Size(); i++) Print("splitted ",i,"\n",splitted[i]); /* splitted 0 [[1,2,3] [7,8,9] [13,14,15]] splitted 1 [[4,5,6] [10,11,12] [16,17,18]] */ matrix_a.Vsplit(3,splitted); for(uint i=0; i<splitted.Size(); i++) Print("splitted ",i,"\n",splitted[i]); /* splitted 0 [[1,2] [7,8] [13,14]] splitted 1 [[3,4] [9,10] [15,16]] splitted 2 [[5,6] [11,12] [17,18]] */ matrix_a.Vsplit(parts,splitted); for(uint i=0; i<splitted.Size(); i++) Print("splitted ",i,"\n",splitted[i]); /* splitted 0 [[1,2] [7,8] [13,14]] splitted 1 [[3,4,5] [9,10,11] [15,16,17]] splitted 2 [[6] [12] [18]] */
Die Methoden Col und Row ermöglichen es, die entsprechenden Matrixelemente zu erhalten und Elemente in nicht zugeordnete Matrizen einzufügen, d. h. in Matrizen ohne die angegebene Größe. Hier ist ein Beispiel:
vector v1={1,2,3}; matrix m1; m1.Col(v1,1); Print("m1\n",m1); /* m1 [[0,1] [0,2] [0,3]] */ matrix m2=matrix::Full(4,5,8); m2.Col(v1,2); Print("m2\n",m2); /* m2 [[8,8,1,8,8] [8,8,2,8,8] [8,8,3,8,8] [8,8,8,8,8]] */ Print("Spalte 1 - ",m2.Col(1)); /* Spalte 1 - [8,8,8,8] */ Print("Spalte 2 - ",m2.Col(2)); /* Spalte 1 - [8,8,8,8] Spalte 2 - [1,2,3,8] */
Produkte
Die Matrixmultiplikation ist einer der grundlegenden Algorithmen, der in numerischen Methoden weit verbreitet ist. Viele Implementierungen von Vorwärts- und Backpropagation-Algorithmen in Convolutionalen Neuronalen Netzwerken basieren auf dieser Operation. Oft entfallen 90-95 % der gesamten für maschinelles Lernen aufgewendeten Zeit auf diesen Vorgang. Alle Produktmethoden sind im Abschnitt Produkte von Matrizen und Vektoren der Sprachreferenz aufgeführt.
Das folgende Beispiel zeigt die Multiplikation von zwei Matrizen mit der Methode MatMul:
matrix a={{1, 0, 0}, {0, 1, 0}}; matrix b={{4, 1}, {2, 2}, {1, 3}}; matrix c1=a.MatMul(b); matrix c2=b.MatMul(a); Print("c1 = \n", c1); Print("c2 = \n", c2); /* c1 = [[4,1] [2,2]] c2 = [[4,1,0] [2,2,0] [1,3,0]] */
Ein Beispiel für das Kronecker-Produkt zweier Matrizen oder einer Matrix und eines Vektors unter Verwendung der Methode Kron.
matrix a={{1,2,3},{4,5,6}}; matrix b=matrix::Identity(2,2); vector v={1,2}; Print(a.Kron(b)); Print(a.Kron(v)); /* [[1,0,2,0,3,0] [0,1,0,2,0,3] [4,0,5,0,6,0] [0,4,0,5,0,6]] [[1,2,2,4,3,6] [4,8,5,10,6,12]] */
Weitere Beispiele aus dem Artikel Matrizen und Vektoren in MQL5:
//--- Matrizen initialisieren matrix m35, m52; m35.Init(3,5,Arange); m52.Init(5,2,Arange); //--- Print("1. Produkt aus horizontalem Vektor v[3] und Matrix m[3,5]"); vector v3 = {1,2,3}; Print("Auf der linken Seite v3 = ",v3); Print("Auf der rechten Seite m35 = \n",m35); Print("v3.MatMul(m35) = horizontaler Vektor v[5] \n",v3.MatMul(m35)); /* 1. Produkt aus horizontalem Vektor v[3] und Matrix m[3,5] auf der linken Seite. Auf der rechten Seite m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] v3.MatMul(m35) = horizontalem Vektor v[5] [40,46,52,58,64] */ //--- zeigen, dass es sich wirklich um einen horizontalen Vektor handelt Print("\n2. Produkt aus Matrix m[1,3] und Matrix m[3,5]"); matrix m13; m13.Init(1,3,Arange,1); Print("Auf der linken Seite m13 = \n",m13); Print("Auf der rechten Seite m35 = \n",m35); Print("m13.MatMul(m35) = matrix m[1,5] \n",m13.MatMul(m35)); /* 2. Produkt aus Matrix m[1,3] und Matrix m[3,5]"); auf der linken Seite. [[1,2,3]] Auf der rechten Seite m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] m13.MatMul(m35) = matrix m[1,5] [[40,46,52,58,64]] */ Print("\n3. Produkt der Matrix m[3,5] und des vertikalen Vektors v[5]"); vector v5 = {1,2,3,4,5}; Print("Auf der linken Seite m35 = \n",m35); Print("und rechts v5 = ",v5); Print("m35.MatMul(v5) = vertikaler Vektor v[3] \n",m35.MatMul(v5)); /* 3. Produkt der Matrix m[3,5] und des vertikalen Vektors v[5] On the left m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] Auf der rechten Seite v5 = [1,2,3,4,5] m35.MatMul(v5) = vertical vector v[3] [40,115,190] */ //--- zeigen, dass es sich wirklich um einen vertikalen Vektor handelt Print("\n4. Produkt aus Matrix m[3,5] und Matrix m[5,1]"); matrix m51; m51.Init(5,1,Arange,1); Print("Auf der linken Seite m35 = \n",m35); Print("Auf der rechten Seite m51 = \n",m51); Print("m35.MatMul(m51) = matrix v[3] \n",m35.MatMul(m51)); /* 4. Produkt aus Matrix m[3,5] und Matrix m[5,1]"); On the left m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] Auf der rechten Seite m51 = [[1] [2] [3] [4] [5]] m35.MatMul(m51) = matrix v[3] [[40] [115] [190]] */ Print("\n5. Produkt aus Matrix m[3,5] und Matrix m[5,2]"); Print("Auf der linken Seite m35 = \n",m35); Print("Auf der rechten Seite m52 = \n",m52); Print("m35.MatMul(m52) = matrix m[3,2] \n",m35.MatMul(m52)); /* 5. Produkt aus Matrix m[3,5] und Matrix m[5,2] On the left m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] Auf der rechten Seite m52 = [[0,1] [2,3] [4,5] [6,7] [8,9]] m35.MatMul(m52) = matrix m[3,2] [[60,70] [160,195] [260,320]] */ Print("\n6. Produkt aus horizontalem Vektor v[5] und Matrix m[5,2]"); Print("Auf der linken Seite v5 = \n",v5); Print("Auf der rechten Seite m52 = \n",m52); Print("v5.MatMul(m52) = horizontaler Vector v[2] \n",v5.MatMul(m52)); /* 6. Produkt aus horizontalem Vektor v[5] und Matrix m[5,2] auf der linken Seite v5 = [1,2,3,4,5] Auf der rechten Seite m52 = [[0,1] [2,3] [4,5] [6,7] [8,9]] v5.MatMul(m52) = horizontaler Vektor v[2] [80,95] */ Print("\n7. Outer()-Produkt des horizontalen Vektors v[5] und des vertikalen Vektors v[3]"); Print("Auf der linken Seite v5 = \n",v5); Print("On the right v3 = \n",v3); Print("v5.Outer(v3) = matrix m[5,3] \n",v5.Outer(v3)); /* 7. Outer()-Produkt des horizontalen Vektors v[5] und des vertikalen Vektors v[3] auf der linken Seite v5 = [1,2,3,4,5] Auf der rechten Seite v3 = [1,2,3] v5.Outer(v3) = matrix m[5,3] [[1,2,3] [2,4,6] [3,6,9] [4,8,12] [5,10,15]] */
Transformationen
Matrixtransformationen werden häufig bei Datenoperationen verwendet. Viele komplexe Matrixoperationen können jedoch aufgrund der begrenzten Genauigkeit von Computern nicht effizient oder stabil gelöst werden.
Matrixtransformationen (oder Zerlegungen) sind Methoden, mit denen eine Matrix in ihre Bestandteile zerlegt werden kann, was die Berechnung komplexerer Matrixoperationen erleichtert. Matrixzerlegungsmethoden, auch Matrixfaktorisierungsmethoden genannt, sind das Rückgrat der linearen Algebra in Computern, selbst für grundlegende Operationen wie das Lösen von linearen Gleichungssystemen, die Berechnung der Inversen und die Berechnung der Determinante einer Matrix.
Beim maschinellen Lernen wird häufig die Singulärwertzerlegung (Singular Value Decomposition, SVD) verwendet, die es ermöglicht, die ursprüngliche Matrix als Produkt von drei anderen Matrizen darzustellen. SVD wird zur Lösung einer Vielzahl von Problemen eingesetzt, von der Annäherung an die kleinsten Quadrate bis hin zur Komprimierung und Bilderkennung.
Ein Beispiel für eine Singulärwertzerlegung nach der Methode SVD:
matrix a= {{0, 1, 2, 3, 4, 5, 6, 7, 8}}; a=a-4; Print("Matrix a \n", a); a.Reshape(3, 3); matrix b=a; Print("matrix b \n", b); //--- SVD-Zerlegung durchführen matrix U, V; vector singular_values; b.SVD(U, V, singular_values); Print("U \n", U); Print("V \n", V); Print("singular_values = ", singular_values); // Prüfblock //--- U * singuläre Diagonale * V = A matrix matrix_s; matrix_s.Diag(singular_values); Print("matrix_s \n", matrix_s); matrix matrix_vt=V.Transpose(); Print("matrix_vt \n", matrix_vt); matrix matrix_usvt=(U.MatMul(matrix_s)).MatMul(matrix_vt); Print("matrix_usvt \n", matrix_usvt); ulong errors=(int)b.Compare(matrix_usvt, 1e-9); double res=(errors==0); Print("errors=", errors); //---- eine weitere Prüfung matrix U_Ut=U.MatMul(U.Transpose()); Print("U_Ut \n", U_Ut); Print("Ut_U \n", (U.Transpose()).MatMul(U)); matrix vt_V=matrix_vt.MatMul(V); Print("vt_V \n", vt_V); Print("V_vt \n", V.MatMul(matrix_vt)); /* matrix a [[-4,-3,-2,-1,0,1,2,3,4]] matrix b [[-4,-3,-2] [-1,0,1] [2,3,4]] U [[-0.7071067811865474,0.5773502691896254,0.408248290463863] [-6.827109697437648e-17,0.5773502691896253,-0.8164965809277256] [0.7071067811865472,0.5773502691896255,0.4082482904638627]] V [[0.5773502691896258,-0.7071067811865474,-0.408248290463863] [0.5773502691896258,1.779939029415334e-16,0.8164965809277258] [0.5773502691896256,0.7071067811865474,-0.408248290463863]] singular_values = [7.348469228349533,2.449489742783175,3.277709923350408e-17] matrix_s [[7.348469228349533,0,0] [0,2.449489742783175,0] [0,0,3.277709923350408e-17]] matrix_vt [[0.5773502691896258,0.5773502691896258,0.5773502691896256] [-0.7071067811865474,1.779939029415334e-16,0.7071067811865474] [-0.408248290463863,0.8164965809277258,-0.408248290463863]] matrix_usvt [[-3.999999999999997,-2.999999999999999,-2] [-0.9999999999999981,-5.977974170712231e-17,0.9999999999999974] [2,2.999999999999999,3.999999999999996]] errors=0 U_Ut [[0.9999999999999993,-1.665334536937735e-16,-1.665334536937735e-16] [-1.665334536937735e-16,0.9999999999999987,-5.551115123125783e-17] [-1.665334536937735e-16,-5.551115123125783e-17,0.999999999999999]] Ut_U [[0.9999999999999993,-5.551115123125783e-17,-1.110223024625157e-16] [-5.551115123125783e-17,0.9999999999999987,2.498001805406602e-16] [-1.110223024625157e-16,2.498001805406602e-16,0.999999999999999]] vt_V [[1,-5.551115123125783e-17,0] [-5.551115123125783e-17,0.9999999999999996,1.110223024625157e-16] [0,1.110223024625157e-16,0.9999999999999996]] V_vt [[0.9999999999999999,1.110223024625157e-16,1.942890293094024e-16] [1.110223024625157e-16,0.9999999999999998,1.665334536937735e-16] [1.942890293094024e-16,1.665334536937735e-16,0.9999999999999996] */ }
Eine weitere häufig verwendete Transformation ist die Cholesky-Zerlegung, die zur Lösung eines linearen Gleichungssystems Ax=b verwendet werden kann, wenn die Matrix A symmetrisch und positiv definit ist.
In MQL5 wird die Cholesky-Zerlegung mit der Methode Cholesky durchgeführt:
matrix matrix_a= {{5.7998084, -2.1825367}, {-2.1825367, 9.85910595}}; matrix matrix_l; Print("matrix_a\n", matrix_a); matrix_a.Cholesky(matrix_l); Print("matrix_l\n", matrix_l); Print("check\n", matrix_l.MatMul(matrix_l.Transpose())); /* matrix_a [[5.7998084,-2.1825367] [-2.1825367,9.85910595]] matrix_l [[2.408279136645086,0] [-0.9062640068544704,3.006291985133859]] check [[5.7998084,-2.1825367] [-2.1825367,9.85910595]] */
Die folgende Tabelle zeigt die Liste der verfügbaren Methoden:
| Funktion | Aktion |
|---|---|
| Berechnet die Cholesky-Zerlegung | |
| Berechnet die Eigenwerte und die rechten Eigenvektoren einer quadratischen Matrix | |
| Berechnet die Eigenwerte einer allgemeinen Matrix | |
| LU-Faktorisierung einer Matrix als Produkt aus einer unteren Dreiecksmatrix und einer oberen Dreiecksmatrix | |
| LUP-Faktorisierung mit partieller Pivotisierung, d.h. LU-Zerlegung nur mit Zeilenpermutationen: PA=LU | |
| Berechnen der qr-Faktorisierung einer Matrix | |
| Singulärwertzerlegung |
Einholen von Statistiken
- Maximal- und Minimalwerte zusammen mit ihren Indizes in einer Matrix/einem Vektor
- Die Summe und das Produkt von Elementen sowie die kumulative Summe und das kumulative Produkt
- Median, Mittelwert, arithmetisches Mittel und gewichtetes arithmetisches Mittel von Matrix-/Vektorwerten
- Standardabweichung und Elementvarianz
- Perzentile und Quantile
- Regressionsmetrik als Abweichungsfehler von der Regressionslinie, die auf der angegebenen Datenreihe konstruiert wurde
Ein Beispiel für die Berechnung der Standardabweichung mit der Methode Std:
matrixf matrix_a={{10,3,2},{1,8,12},{6,5,4},{7,11,9}};
Print("matrix_a\n",matrix_a);
vectorf cols_std=matrix_a.Std(0);
vectorf rows_std=matrix_a.Std(1);
float matrix_std=matrix_a.Std();
Print("cols_std ",cols_std);
Print("rows_std ",rows_std);
Print("std value ",matrix_std);
/*
matrix_a
[[10,3,2]
[1,8,12]
[6,5,4]
[7,11,9]]
cols_std [3.2403703,3.0310888,3.9607449]
rows_std [3.5590262,4.5460606,0.81649661,1.6329932]
std value 3.452052593231201
*/
Berechnung von Quantilen nach der Methode Quantil:
matrixf matrix_a={{1,2,3},{4,5,6},{7,8,9},{10,11,12}};
Print("matrix_a\n",matrix_a);
vectorf cols_percentile=matrix_a.Percentile(50,0);
vectorf rows_percentile=matrix_a.Percentile(50,1);
float matrix_percentile=matrix_a.Percentile(50);
Print("cols_percentile ",cols_percentile);
Print("rows_percentile ",rows_percentile);
Print("percentile value ",matrix_percentile);
/*
matrix_a
[[1,2,3]
[4,5,6]
[7,8,9]
[10,11,12]]
cols_percentile [5.5,6.5,7.5]
rows_percentile [2,5,8,11]
percentile value 6.5
*/
Eigenschaften der Matrix
Verwenden Sie Methoden aus dem Abschnitt Eigenschaften, um die folgenden Werte zu erhalten:
- Die Anzahl der Zeilen und Spalten in einer Matrix.
- Norm und Konditionsnummer.
- Determinante, Rang, Spur und Spektrum einer Matrix.
Berechnung des Rangs einer Matrix mit der Methode Rank:
matrix a=matrix::Eye(4, 4);; Print("Matrix a \n", a); Print("a.Rank()=", a.Rank()); matrix I=matrix::Eye(4, 4); I[3, 3] = 0.; // Matrixdefizit Print("I \n", I); Print("I.Rank()=", I.Rank()); matrix b=matrix::Ones(1, 4); Print("b \n", b); Print("b.Rang()=", b.Rang());;// 1 Größe - Rang 1, außer alles ist 0 matrix zeros=matrix::Zeros(4, 1); Print("zeros \n", zeros); Print("zeros.Rank()=", zeros.Rank()); /* matrix a [[1,0,0,0] [0,1,0,0] [0,0,1,0] [0,0,0,1]] a.Rank()=4 I [[1,0,0,0] [0,1,0,0] [0,0,1,0] [0,0,0,0]] I.Rank()=3 b [[1,1,1,1]] b.Rank()=1 zeros [[0] [0] [0] [0]] zeros.Rank()=0 */
Berechnung einer Norm mit der Methode Norm:
matrix a= {{0, 1, 2, 3, 4, 5, 6, 7, 8}}; a=a-4; Print("Matrix a \n", a); a.Reshape(3, 3); matrix b=a; Print("matrix b \n", b); Print("b.Norm(MATRIX_NORM_P2)=", b.Norm(MATRIX_NORM_FROBENIUS)); Print("b.Norm(MATRIX_NORM_FROBENIUS)=", b.Norm(MATRIX_NORM_FROBENIUS)); Print("b.Norm(MATRIX_NORM_INF)", b.Norm(MATRIX_NORM_INF)); Print("b.Norm(MATRIX_NORM_MINUS_INF)", b.Norm(MATRIX_NORM_MINUS_INF)); Print("b.Norm(MATRIX_NORM_P1)=)", b.Norm(MATRIX_NORM_P1)); Print("b.Norm(MATRIX_NORM_MINUS_P1)=", b.Norm(MATRIX_NORM_MINUS_P1)); Print("b.Norm(MATRIX_NORM_P2)=", b.Norm(MATRIX_NORM_P2)); Print("b.Norm(MATRIX_NORM_MINUS_P2)=", b.Norm(MATRIX_NORM_MINUS_P2)); /* matrix a [[-4,-3,-2,-1,0,1,2,3,4]] matrix b [[-4,-3,-2] [-1,0,1] [2,3,4]] b.Norm(MATRIX_NORM_P2)=7.745966692414834 b.Norm(MATRIX_NORM_FROBENIUS)=7.745966692414834 b.Norm(MATRIX_NORM_INF)9.0 b.Norm(MATRIX_NORM_MINUS_INF)2.0 b.Norm(MATRIX_NORM_P1)=)7.0 b.Norm(MATRIX_NORM_MINUS_P1)=6.0 b.Norm(MATRIX_NORM_P2)=7.348469228349533 b.Norm(MATRIX_NORM_MINUS_P2)=1.857033188519056e-16 */
Lösen von Gleichungen
Bei Methoden des maschinellen Lernens und bei Optimierungsproblemen müssen häufig Lösungen für ein System linearer Gleichungen gefunden werden. Der Abschnitt Berechnungen enthält vier Methoden, die die Lösung solcher Gleichungen in Abhängigkeit vom Matrixtyp ermöglichen.
| Funktion | Aktion |
|---|---|
| Lösen einer linearen Matrixgleichung oder eines Systems linearer algebraischer Gleichungen | |
| Rückgabe des Ergebnisses der Lösung einer linearen, algebraischen Gleichungen nach dem Prinzip der kleinsten Quadrate (für nicht quadratische oder entartete Matrizen) | |
| Berechnung der multiplikativen Inversen einer quadratischen invertierbaren Matrix nach der Jordan-Gauss-Methode | |
| Berechnung der Pseudoinverse einer Matrix nach der Moore-Penrose-Methode |
Betrachten Sie ein Beispiel für die Lösung der Gleichung A*x=b.

Wir müssen den Lösungsvektor x finden. Da die Matrix A nicht quadratisch ist, kann die Methode Solve hier nicht verwendet werden.
Wir werden die Methode LstSq verwenden, die es ermöglicht, nicht quadratische oder entartete Matrizen näherungsweise zu lösen.
matrix a={{3, 2}, {4,-5}, {3, 3}}; vector b={7,40,3}; //--- das System A*x = b lösen vector x=a.LstSq(b); //--- Ergebnisprüfung, x muss gleich [5, -4] sein Print("x=", x); /* x=[5.00000000,-4] */ //--- Prüfung A*x = b1, der resultierende Vektor muss [7, 40, 3] sein vector b1=a.MatMul(x); Print("b11=",b1); /* b1=[7.0000000,40.0000000,3.00000000] */
Die Prüfung hat ergeben, dass der gefundene Vektor x die Lösung dieses Gleichungssystems ist.
Methoden des maschinellen Lernens
Es gibt drei Matrix- und Vektorverfahren, die beim maschinellen Lernen eingesetzt werden können.
| Funktion | Aktion |
|---|---|
| Aktivierungsfunktionswerte berechnen und in den übergebenen Vektor/die Matrix schreiben | |
| Ableitungswerte der Aktivierungsfunktion berechnen und in den übergebenen Vektor/die Matrix schreiben | |
| Verlustfunktionswerte berechnen und in den übergebenen Vektor/die Matrix schreiben |
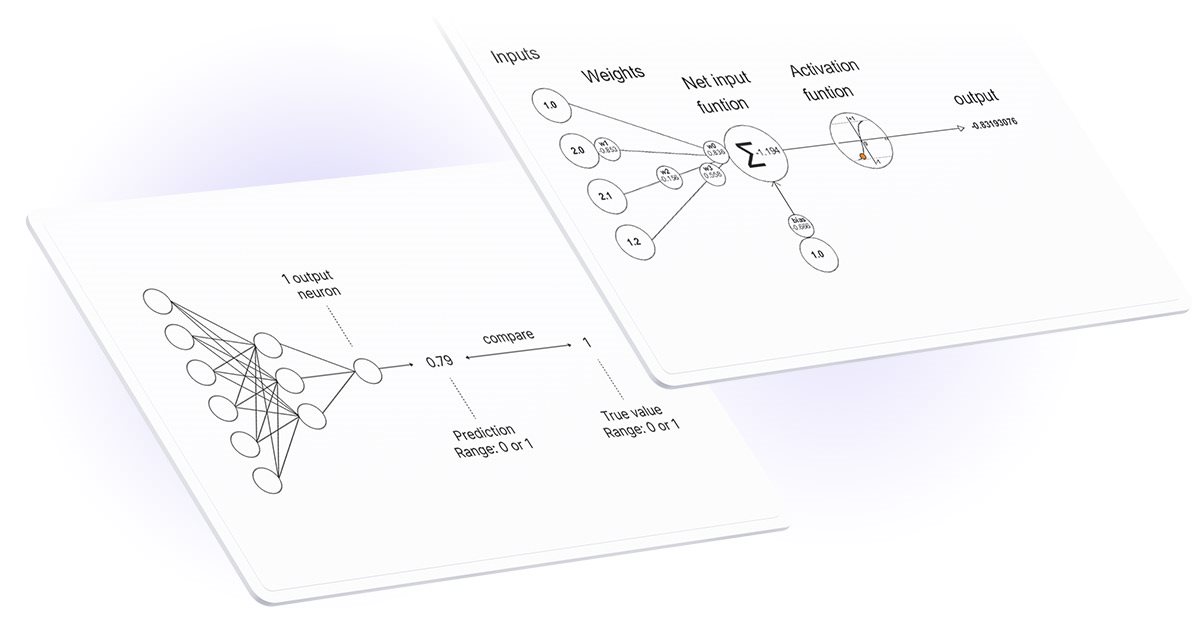
Aktivierungsfunktionen werden in neuronalen Netzen verwendet, um eine Ausgabe in Abhängigkeit von der gewichteten Summe der Eingaben zu finden. Die Auswahl der Aktivierungsfunktion hat einen großen Einfluss auf die Leistung des neuronalen Netzes.
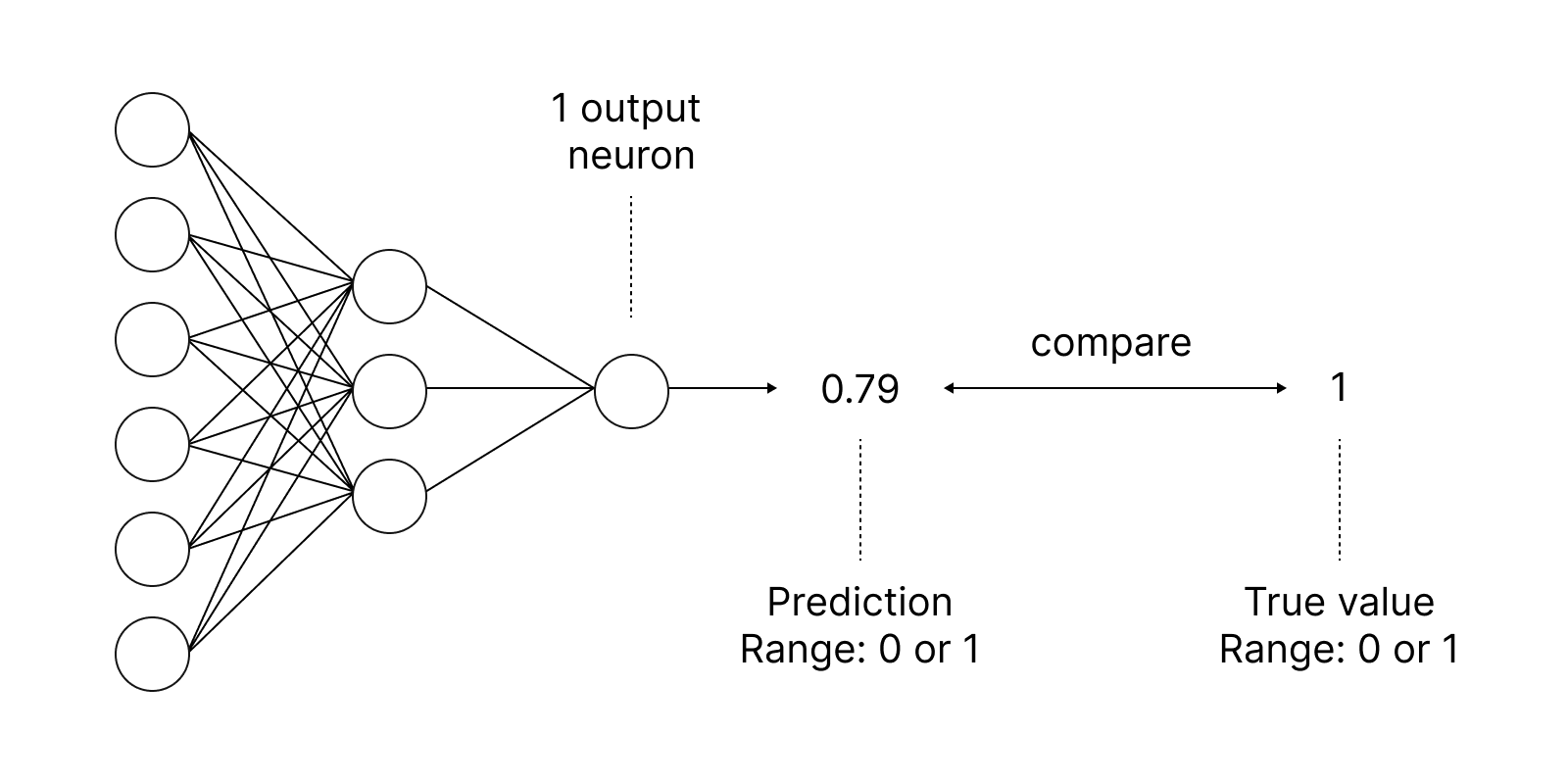
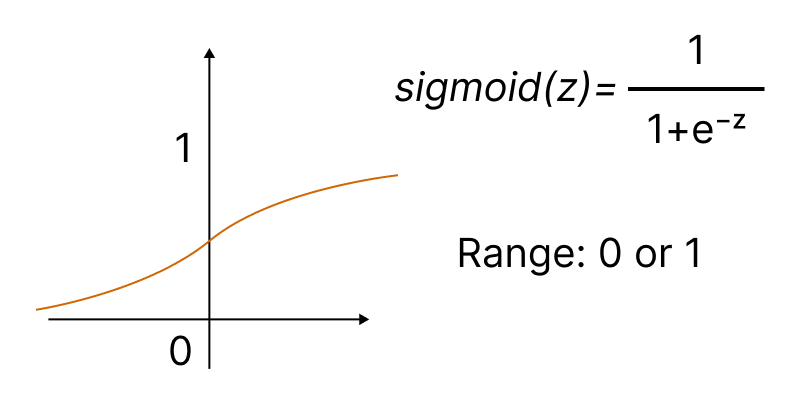
Eine der beliebtesten Aktivierungsfunktionen ist das Sigmoid.
Die integrierte Methode Activation ermöglicht es, einen der fünfzehn Typen der Aktivierungsfunktion einzustellen. Sie sind alle in der Enumeration ENUM_ACTIVATION_FUNCTION verfügbar.
| ID | Beschreibung |
|---|---|
| AF_ELU | Exponentielle Linear Unit |
| AF_EXP | Exponentiell |
| AF_GELU | Gaussian Error Linear Unit |
| AF_HARD_SIGMOID | Hard Sigmoid |
| AF_LINEAR | Linear |
| AF_LRELU | Leaky Rectified Linear Unit |
| AF_RELU | Rectified Linear Unit |
| AF_SELU | Skalierte Exponential Linear Unit |
| AF_SIGMOID | Sigmoid |
| AF_SOFTMAX | Softmax |
| AF_SOFTPLUS | Softplus |
| AF_SOFTSIGN | Softsign |
| AF_SWISH | Swish |
| AF_TANH | Die hyperbolische Tangensfunktion |
| AF_TRELU | Thresholded Rectified Linear Unit |
Ein neuronales Netz zielt darauf ab, einen Algorithmus zu finden, der den Fehler beim Lernen minimiert, wofür die Verlustfunktion verwendet wird. Die Abweichung wird mit der Methode Loss berechnet, für die Sie einen von vierzehn Typen aus der Enumeration ENUM_LOSS_FUNCTION angeben können.
Die daraus resultierenden Abweichungswerte werden dann zur Verfeinerung der Parameter des neuronalen Netzes verwendet. Dies geschieht mit der Methode Derivative, die die Werte der Ableitung der Aktivierungsfunktion berechnet und das Ergebnis in den übergebenen Vektor/die Matrix schreibt. Der Trainingsprozess des neuronalen Netzes kann mit der Animation aus dem Artikel „Programmierung eines Tiefen Neuronalen Netzes von Grund auf mit der Sprache MQL“ visuell dargestellt werden.
Verbesserungen in OpenCL
Wir haben auch Matrix- und Vektorunterstützung in den Funktionen CLBufferWrite und CLBufferRead implementiert. Für diese Funktionen gibt es entsprechende Überladungen. Das Beispiel einer Matrix ist unten dargestellt.
Schreiben der Werte aus der Matrix in den Puffer und bei Erfolg Rückgabe von true.
uint CLBufferWrite( int buffer, // Puffer-Handle für OpenCL uint buffer_offset, // Offset im OpenCL-Puffer in Bytes matrix<T>&mat // Matrix der in den Puffer zu schreibenden Werte );
Einlesen eines OpenCL-Puffer in eine Matrix und bei Erfolg Rückgabe von true.
uint CLBufferRead( int buffer, // Puffer-Handle für OpenCL uint buffer_offset, // Offset im OpenCL-Puffer in Bytes const matrix& mat, // Matrix zum Abrufen von Werten aus dem Puffer ulong rows=-1, // Anzahl der Zeilen in der Matrix ulong cols=-1 // Anzahl der Spalten in der Matrix );
Betrachten wir die Verwendung der neuen Überladungen anhand eines Beispiels für ein Matrixprodukt zweier Matrizen. Lassen Sie uns die Berechnungen nach drei Methoden durchführen:
- Ein naiver Weg zur Veranschaulichung des Algorithmus zur Matrixmultiplikation
- Die integrierte Methode MatMul
- Parallele Berechnung in OpenCL
Die erhaltenen Matrizen werden mit der Methode Compare überprüft, die die Elemente zweier Matrizen mit der angegebenen Genauigkeit vergleicht.
#define M 3000 // Anzahl der Zeilen in der ersten Matrix #define K 2000 // Anzahl der Spalten der ersten Matrix gleich der Anzahl der Zeilen der zweiten Matrix #define N 3000 // Anzahl der Spalten in der zweiten Matrix //+------------------------------------------------------------------+ const string clSrc= "#define N "+IntegerToString(N)+" \r\n" "#define K "+IntegerToString(K)+" \r\n" " \r\n" "__kernel void matricesMul( __global float *in1, \r\n" " __global float *in2, \r\n" " __global float *out ) \r\n" "{ \r\n" " int m = get_global_id( 0 ); \r\n" " int n = get_global_id( 1 ); \r\n" " float sum = 0.0; \r\n" " for( int k = 0; k < K; k ++ ) \r\n" " sum += in1[ m * K + k ] * in2[ k * N + n ]; \r\n" " out[ m * N + n ] = sum; \r\n" "} \r\n"; //+------------------------------------------------------------------+ //| Skript Programm Start Funktion | //+------------------------------------------------------------------+ void OnStart() { //--- Initialisierung des Zufallszahlengenerators MathSrand((int)TimeCurrent()); //--- Matrizen der angegebenen Größe mit Zufallswerten füllen matrixf mat1(M, K, MatrixRandom) ; // erste Matrix matrixf mat2(K, N, MatrixRandom); // zweite Matrix //--- Berechnung des Produkts von Matrizen auf naive Weise uint start=GetTickCount(); matrixf matrix_naive=matrixf::Zeros(M, N);// hier wird das Ergebnis der Multiplikation zweier Matrizen wiedergegeben for(int m=0; m<M; m++) for(int k=0; k<K; k++) for(int n=0; n<N; n++) matrix_naive[m][n]+=mat1[m][k]*mat2[k][n]; uint time_naive=GetTickCount()-start; //--- Berechnung des Produkts von Matrizen mit MatMull start=GetTickCount(); matrixf matrix_matmul=mat1.MatMul(mat2); uint time_matmul=GetTickCount()-start; //--- Berechnung des Produkts von Matrizen in OpenCL matrixf matrix_opencl=matrixf::Zeros(M, N); int cl_ctx; // Kontext-Handle if((cl_ctx=CLContextCreate(CL_USE_GPU_ONLY))==INVALID_HANDLE) { Print("OpenCL not found, exit"); return; } int cl_prg; // Programm-Handle int cl_krn; // Kernel-Handle int cl_mem_in1; // Handle des ersten Puffers (Eingang) int cl_mem_in2; // Handle des zweiten Puffers (Eingang) int cl_mem_out; // Handle des dritten Puffers (Ausgabe) //--- das Programm und den Kernel erstellen cl_prg = CLProgramCreate(cl_ctx, clSrc); cl_krn = CLKernelCreate(cl_prg, "matricesMul"); //--- alle drei Puffer für die drei Matrizen erstellen cl_mem_in1=CLBufferCreate(cl_ctx, M*K*sizeof(float), CL_MEM_READ_WRITE); cl_mem_in2=CLBufferCreate(cl_ctx, K*N*sizeof(float), CL_MEM_READ_WRITE); //--- dritte Matrix - Ausgabe cl_mem_out=CLBufferCreate(cl_ctx, M*N*sizeof(float), CL_MEM_READ_WRITE); //--- Kernel-Argumente setzen CLSetKernelArgMem(cl_krn, 0, cl_mem_in1); CLSetKernelArgMem(cl_krn, 1, cl_mem_in2); CLSetKernelArgMem(cl_krn, 2, cl_mem_out); //--- Matrizen in Gerätepuffer schreiben CLBufferWrite(cl_mem_in1, 0, mat1); CLBufferWrite(cl_mem_in2, 0, mat2); CLBufferWrite(cl_mem_out, 0, matrix_opencl); //--- Startzeit der Code-Ausführung von OpenCL start=GetTickCount(); //--- die Parameter für den Arbeitsbereich der Aufgabe festlegen und das OpenCL-Programm ausführen uint offs[2] = {0, 0}; uint works[2] = {M, N}; start=GetTickCount(); bool ex=CLExecute(cl_krn, 2, offs, works); //--- das Ergebnis in die Matrix einlesen if(CLBufferRead(cl_mem_out, 0, matrix_opencl)) PrintFormat("Matrix [%d x %d] read ", matrix_opencl.Rows(), matrix_opencl.Cols()); else Print("CLBufferRead(cl_mem_out, 0, matrix_opencl ist fehlgeschlagen. Fehler ",GetLastError()); uint time_opencl=GetTickCount()-start; Print("Vergleich der Rechenzeiten der Methoden"); PrintFormat("Naive Rechenzeit = %d ms",time_naive); PrintFormat("MatMul Rechenzeit = %d ms",time_matmul); PrintFormat("OpenCl Rechenzeit = %d ms",time_opencl); //--- alle OpenCL-Kontexte freigeben CLFreeAll(cl_ctx, cl_prg, cl_krn, cl_mem_in1, cl_mem_in2, cl_mem_out); //--- alle erhaltenen Ergebnismatrizen miteinander vergleichen Print("Anzahl der Diskrepanzfehler zwischen den Ergebnismatrizen?"); ulong errors=matrix_naive.Compare(matrix_matmul,(float)1e-12); Print("matrix_direct.Compare(matrix_matmul,1e-12)=",errors); errors=matrix_matmul.Compare(matrix_opencl,float(1e-12)); Print("matrix_matmul.Compare(matrix_opencl,1e-12)=",errors); /* Ergebnis: Matrix [3000 x 3000] lesen Vergleich der Rechenzeiten der Methoden Naive Rechenzeit = 54750 ms MatMul Rechenzeit = 4578 ms OpenCl Rechenzeit = 922 ms Anzahl der Diskrepanzfehler zwischen den Ergebnismatrizen? matrix_direct.Compare(matrix_matmul,1e-12)=0 matrix_matmul.Compare(matrix_opencl,1e-12)=0 */ } //+------------------------------------------------------------------+ //| Füllt die Matrix mit Zufallswerten | //+------------------------------------------------------------------+ void MatrixRandom(matrixf& m) { for(ulong r=0; r<m.Rows(); r++) { for(ulong c=0; c<m.Cols(); c++) { m[r][c]=(float)((MathRand()-16383.5)/32767.); } } } //+------------------------------------------------------------------+ //--- alle OpenCL-Kontexte freigeben //+------------------------------------------------------------------+ void CLFreeAll(int cl_ctx, int cl_prg, int cl_krn, int cl_mem_in1, int cl_mem_in2, int cl_mem_out) { //--- alle erstellten OpenCL-Kontexte in umgekehrter Reihenfolge freigeben CLBufferFree(cl_mem_in1); CLBufferFree(cl_mem_in2); CLBufferFree(cl_mem_out); CLKernelFree(cl_krn); CLProgramFree(cl_prg); CLContextFree(cl_ctx); }
Eine detaillierte Erläuterung des OpenCL-Codes aus diesem Beispiel finden Sie im Artikel „OpenCL: Vom naiven zum aufschlussreicheren Programmieren“.
Weitere Verbesserungen
Build 3390 hob zwei Einschränkungen im OpenCL-Betrieb auf, die die GPU-Nutzung beeinträchtigten.
Um die obligatorische Verwendung von Grafikprozessoren mit double-Unterstützung für bestimmte Aufgaben festzulegen, verwenden Sie die Option CL_USE_GPU_DOUBLE_ONLY im Aufruf CLContextCreate.
int cl_ctx; //--- Initialisierung des OpenCL-Kontexts if((cl_ctx=CLContextCreate(CL_USE_GPU_DOUBLE_ONLY))==INVALID_HANDLE) { Print("OpenCL nicht gefunden"); return; }
Obwohl die Änderungen bei den OpenCL-Operationen nicht direkt mit Matrizen und Vektoren zu tun haben, stehen sie im Einklang mit unseren Bemühungen bei der Entwicklung der maschinellen Lernfähigkeiten der Sprache MQL5.
Die Zukunft von MQL5 im maschinellen Lernen
In den letzten Jahren haben wir viel getan, um fortschrittliche Technologien in die MQL5-Sprache einzuführen:
- Portierung der Bibliothek ALGLIB für numerische Methoden auf MQL5
- Implementierung einer mathematischen Bibliothek mit Fuzzy-Logik und statistischen Methoden
- Einführung in die Grafikbibliothek, analog zur Plot-Funktion
- Integration mit Python zur Ausführung von Python-Skripten direkt im Terminal
- Hinzufügen von DirectX-Funktionen zur Erstellung von 3D-Grafiken
- Implementierung von nativer SQLite-Unterstützung für Operationen mit Datenbanken
- Hinzufügen neuer Datentypen: Matrizen und Vektoren, zusammen mit allen erforderlichen Methoden
Die MQL5-Sprache wird sich weiter entwickeln, wobei das maschinelle Lernen eine der wichtigsten Prioritäten ist. Wir haben große Pläne für die weitere Entwicklung. Bleiben Sie uns also treu, unterstützen Sie uns und lernen Sie weiterhin mit uns.
Übersetzt aus dem Russischen von MetaQuotes Ltd.
Originalartikel: https://www.mql5.com/ru/articles/10922
Warnung: Alle Rechte sind von MetaQuotes Ltd. vorbehalten. Kopieren oder Vervielfältigen untersagt.

 Einen handelnden Expert Advisor von Grund auf neu entwickeln (Teil 22): Neues Auftragssystems (V)
Einen handelnden Expert Advisor von Grund auf neu entwickeln (Teil 22): Neues Auftragssystems (V)
 Techniken des MQL5-Assistenten, die Sie kennen sollten (Teil 03): Shannonsche Entropie
Techniken des MQL5-Assistenten, die Sie kennen sollten (Teil 03): Shannonsche Entropie
 Einen handelnden Expert Advisor von Grund auf neu entwickeln (Teil 23): Neues Auftragssystems (VI)
Einen handelnden Expert Advisor von Grund auf neu entwickeln (Teil 23): Neues Auftragssystems (VI)
 Neuronale Netze leicht gemacht (Teil 20): Autoencoder
Neuronale Netze leicht gemacht (Teil 20): Autoencoder
- Freie Handelsapplikationen
- Über 8.000 Signale zum Kopieren
- Wirtschaftsnachrichten für die Lage an den Finanzmärkte
Sie stimmen der Website-Richtlinie und den Nutzungsbedingungen zu.
Bitte klären Sie, wie man eine Spalte von einer Matrix in eine andere kopiert!
Ich verstehe das Beispiel mit dem Kopieren in einen Vektor nicht.
Hier ist ein Teil meines Codes
Ich erhalte einen Fehler
Das stammt aus einem anderen Thread:
V_Data_calc.Cov(m_Data_calc,0);Es sollte wahrscheinlich in etwa so ablaufen:
Das stammt aus einem anderen Thread:
Es sollte wahrscheinlich in etwa so ablaufen:
Vielen Dank! Woher wussten Sie, dass Sie das so machen müssen?
Ich danke Ihnen! Woher wussten Sie, dass Sie das so machen müssen?
Ich kann auch nicht erkennen, wie die Berechnung der Kovarianz beim Kopieren helfen kann - Cov
Ich kann auch nicht erkennen, wie die Berechnung der Kovarianz beim Kopieren helfen kann - Cov
Es scheint klar, dass ich mich im Forum beschrieben habe - der Code aus der Hilfe ist ja korrekt.