Odyssea B3 Trader
- Asesores Expertos
-
Renato Takahashi
 I´m an Automation Enginner and, since I´ve been presented to financial markets, get in love with expert advisors and with the great opportunity to help you make profit in Forex, mainly.
I´m an Automation Enginner and, since I´ve been presented to financial markets, get in love with expert advisors and with the great opportunity to help you make profit in Forex, mainly. - Versión: 1.2
- Actualizado: 11 marzo 2023
- Activaciones: 15
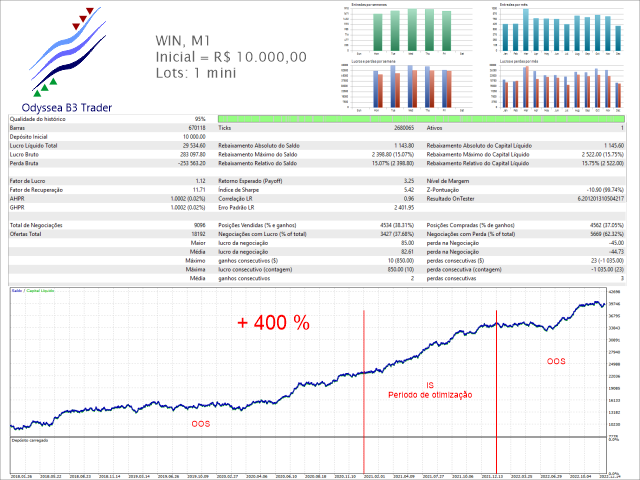
Odyssea B3 Trader es su robot trader para el iBovespa (B3), el miníndice WIN o el minidólar WDO, que utiliza la alineación de las medias móviles como estrategia para analizar la entrada de operaciones. El filtro de alineación se basa en la medición de la distancia entre las medias 1 y 2 y las medias 2 y 3, mediante la relación entre la diferencia de las medias 1 y 2 y la diferencia de las medias 2 y 3. Esto permite que valores mayores indiquen posibles retrocesos y valores menores indiquen la tendencia, sin martingala ni scalping.
Para mejorar aún más las cosas, se puede establecer un valor mínimo para que se produzca esta alineación, y también se puede aplicar el filtro SAR Parabólico.
Los stops TP (Take Profit) y SL (Stop Loss) pueden ser fijos o dinámicos, en función de los Puntos Pivote calculados para cada periodo.
Con unos pocos parámetros de optimización, manteniendo las medias estándar de Fibonacci, es posible evitar el sobreajuste del sistema y mejorar el rendimiento fuera de muestra (OOS) del sistema de trading Odyssea.
Además, el robot cuenta con un algoritmo de gestión de riesgos que detiene las operaciones cuando alcanzan el límite diario de ganancias o el límite diario de pérdidas.
Es importante tener en cuenta que el parámetro BR1 debe cambiarse a BR antes de ejecutar el robot. El activo recomendado para este robot de trading es el índice WIN mini, y el marco temporal es M1.
Para aquellos que buscan un robot de trading para Metatrader 5, Odyssea B3 Trader podría ser una excelente opción, con su estrategia basada en medias móviles y stops dinámicos, ofreciendo una forma efectiva de automatizar el trading en bolsa.
Los usuarios pueden personalizar el robot ajustando los parámetros de entrada y salida para diferentes condiciones de mercado. Para aumentar la transparencia, es posible proporcionar estadísticas de rentabilidad y riesgo, así como ejemplos de backtesting o resultados de operaciones en directo para evaluar la eficacia del robot.