당사 팬 페이지에 가입하십시오

Kalman_Filter - MetaTrader 5용 지표
- 조회수:
- 5886
- 평가:
- 게시됨:
-
 이 코드를 기반으로 한 로봇이나 지표가 필요하신가요? 프리랜스로 주문하세요
프리랜스로 이동
이 코드를 기반으로 한 로봇이나 지표가 필요하신가요? 프리랜스로 주문하세요
프리랜스로 이동
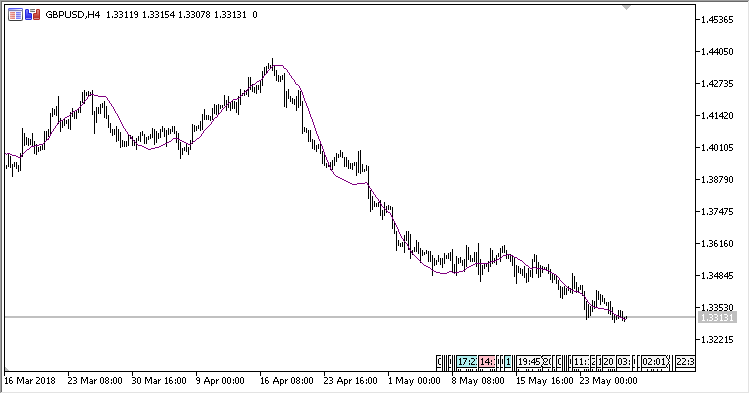
Indicator Kalman Filter. It allows efficiently smoothing the noise, extracting the main trend from it.
Kalman Filter is a variety of recursive filters. To assess the system status as of the current operation tact, it needs a status assessment (as the system status assessment and the error assessment of defining this status) at the preceding operation tact, and measuring at the current tact. This property distinguishes it from packet filters requiring to know at the current operation tact the history of measurements and/or assessments.
More about Kalman Filter.
The indicator has three input parameters:
- K - Kalman factor;
- Sharpness - factor for calculating the error minimization;
- Applied price - price used for calculations.
Calculations:
Kalman[i] = Error + Velocity[i]
where:
Error = Kalman[i-1] + Distance * ShK Velocity[i] = Velocity[i-1] + Distance * K / 100 Distance = Price[i] - Kalman[i-1] ShK = sqrt(Sharpness * K / 100)
MetaQuotes Ltd에서 러시아어로 번역함.
원본 코드: https://www.mql5.com/ru/code/20916
HL_StdDev
The oscillator shows standard deviation calculated on the difference between the High and the Low.
EMA_Trend
Two channels by the High and Low of MA.
Wiseman
Wiseman is an indicator basically aimed at showing the candlestick, on which the trend has changed its direction.
Rainbow_Volume
A colored tick-volume indicator.