記事「ニューラルネットワークが簡単に(第22部):回帰モデルの教師なし学習」についてのディスカッション 新しいコメント MetaQuotes 2022.11.03 10:03 新しい記事「ニューラルネットワークが簡単に(第22部):回帰モデルの教師なし学習」はパブリッシュされました: モデルと教師なし学習アルゴリズムの研究を続けます。今回は、回帰モデルの学習に適用した場合のオートエンコーダの特徴について提案します。 モデルテストのパラメータは同じでした(EURUSD、H1、過去15年、指標のデフォルト設定)。エンコーダに過去10回分のローソク足に関するデータを入力します。デコーダは、過去40個のローソク足をデコードするように訓練されます。テスト結果は下のチャートのとおりです。新しいローソク足の形成が完了するたびに、エンコーダにデータが入力されます。 このチャートからわかるように、回帰モデルの教師なし事前学習において、この手法が有効であることが確認されましました。モデルのテスト訓練では、20回の訓練エポックの後、モデルの誤差は9%以下の損失率でほぼ安定しました。また、少なくとも過去30回の繰り返しに関する情報は、モデルの潜在的な状態に保存されます。 作者: Dmitriy Gizlyk 1432189 2024.05.28 11:24 #1 このエラーについてどなたか教えてください。 ファイル: Screenshot_v3201.png 152 kb 1432189 2024.05.28 15:29 #2 「"NeuroNetPR.mqh"(2512,18)のポインタへのアクセスが無効 です。 Dmitriy Gizlyk 2024.05.28 20:15 #3 1432189 #:このエラーについてどなたか教えてください。 このエラーはclang sizeで発生するもので、mql5で発生するものではありません。 1432189 2024.05.29 19:41 #4 Dmitriy Gizlyk #:こんにちは、このエラーはmql5ではなくclang sizeで表示されます。 私は理解できません詳しく教えてください ありがとうございました。 Dmitriy Gizlyk 2024.05.29 20:16 #5 1432189 #:よくわからないのですが、詳しく教えてください。ありがとうございました。 まず、デバイスにOpenCLドライバを再インストールしてみてください。 1432189 2024.05.30 16:41 #6 Dmitriy Gizlyk #:まず、デバイスにOpenCLドライバを再インストールしてみてください。 こんにちは、私はそれを試してみましたが、まだ動作しませんでした...同じエラーが記事8からあり、私はそれを解決する方法を見つけられませんでした。 このエラーは、CNET ::save関数のbool result=layers.Save(handle);という宣言のところで、"layers "変数を指しています。 Dmitriy Gizlyk 2024.05.30 17:19 #7 1432189 #:こんにちは、私はそれを試してみましたが、まだ動作しませんでした......同じエラーが記事8から存在し、私はそれを解決する方法を見つけられませんでした。このエラーは、CNET ::save関数のbool result=layers.Save(handle);という宣言のところで、"layers "変数を指しています。 MetaTrader 5オプションで表示されるもの 1432189 2024.05.30 17:39 #8 Dmitriy Gizlyk #:MetaTrader 5オプションで表示されるもの これは正しいですか? ファイル: Screenshot_a3238.png 131 kb 新しいコメント 取引の機会を逃しています。 無料取引アプリ 8千を超えるシグナルをコピー 金融ニュースで金融マーケットを探索 新規登録 ログイン スペースを含まないラテン文字 このメールにパスワードが送信されます エラーが発生しました Googleでログイン WebサイトポリシーおよびMQL5.COM利用規約に同意します。 新規登録 MQL5.com WebサイトへのログインにCookieの使用を許可します。 ログインするには、ブラウザで必要な設定を有効にしてください。 ログイン/パスワードをお忘れですか? Googleでログイン
{kind=link}
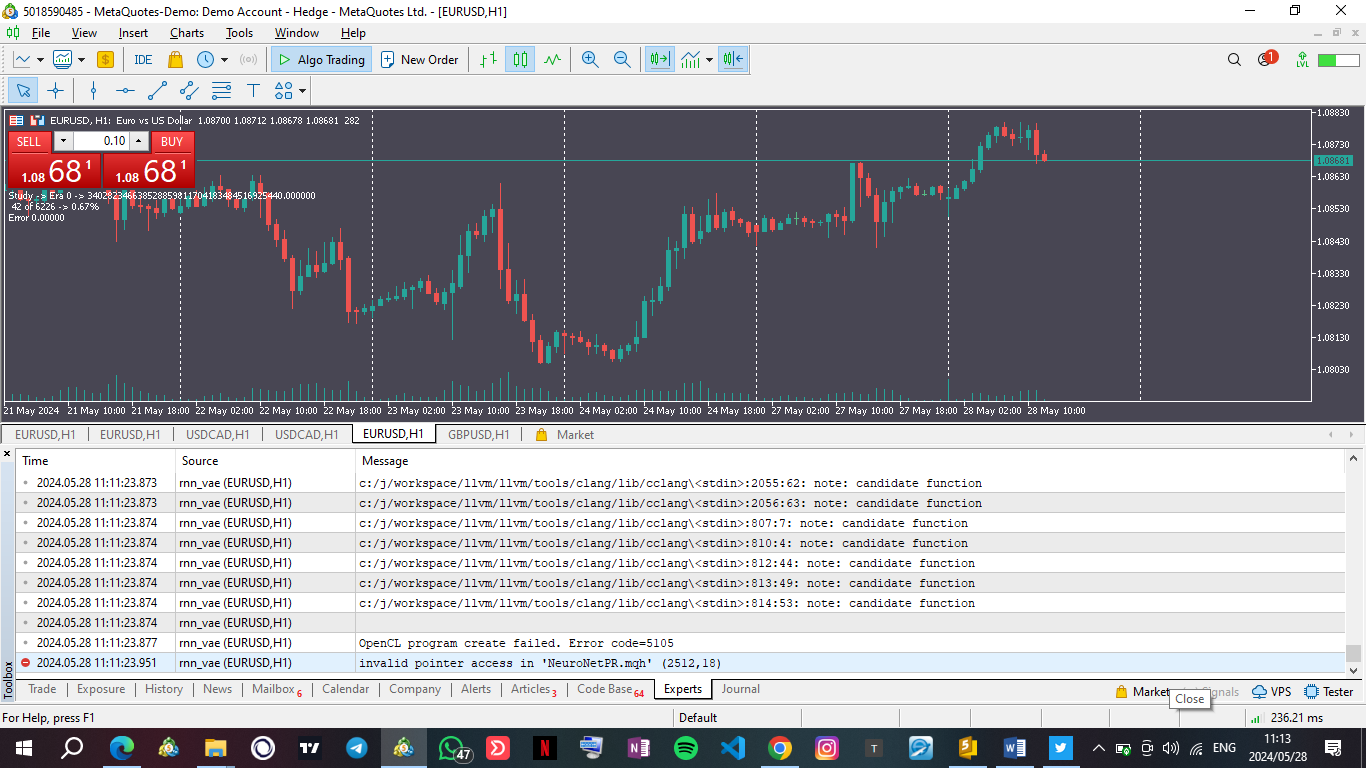
{kind=link}
新しい記事「ニューラルネットワークが簡単に(第22部):回帰モデルの教師なし学習」はパブリッシュされました:
モデルと教師なし学習アルゴリズムの研究を続けます。今回は、回帰モデルの学習に適用した場合のオートエンコーダの特徴について提案します。
モデルテストのパラメータは同じでした(EURUSD、H1、過去15年、指標のデフォルト設定)。エンコーダに過去10回分のローソク足に関するデータを入力します。デコーダは、過去40個のローソク足をデコードするように訓練されます。テスト結果は下のチャートのとおりです。新しいローソク足の形成が完了するたびに、エンコーダにデータが入力されます。
このチャートからわかるように、回帰モデルの教師なし事前学習において、この手法が有効であることが確認されましました。モデルのテスト訓練では、20回の訓練エポックの後、モデルの誤差は9%以下の損失率でほぼ安定しました。また、少なくとも過去30回の繰り返しに関する情報は、モデルの潜在的な状態に保存されます。
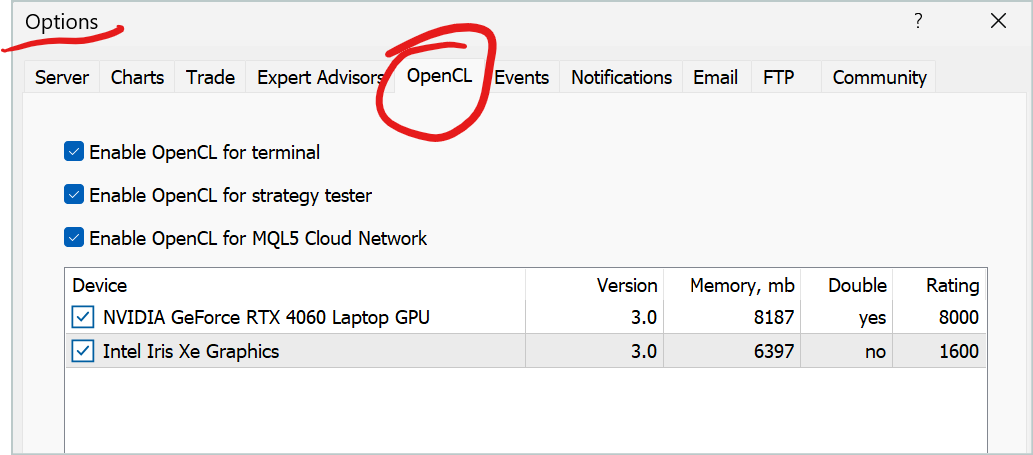
作者: Dmitriy Gizlyk