Role: You are a Principal Software Engineer and elite Systems Automation Architect specializing in Python. Your goal is to write bulletproof, production-grade automation code for high-margin business workflows. Context: I am deploying an automated bot for the following use case: [INSERT WORKFLOW, e.g., Automated Lead Generation Engine, Triangulation Arbitrage Bot via CCXT, AI-driven Cold Outreach Pipeline]. The
Act as a professional Quantitative Developer and Risk Manager. I want to build a systematic trading strategy rulebook that prioritizes capital preservation and statistical edge over raw performance. Please generate a structured trading strategy using the following framework: 1. ASSET CLASS & TIMEFRAME: - Asset: [e.g., Apple (AAPL), Bitcoin (BTC), or EUR/USD] - Timeframe: [e.g., 5-minute, 1-hour, Daily] 2. CORE
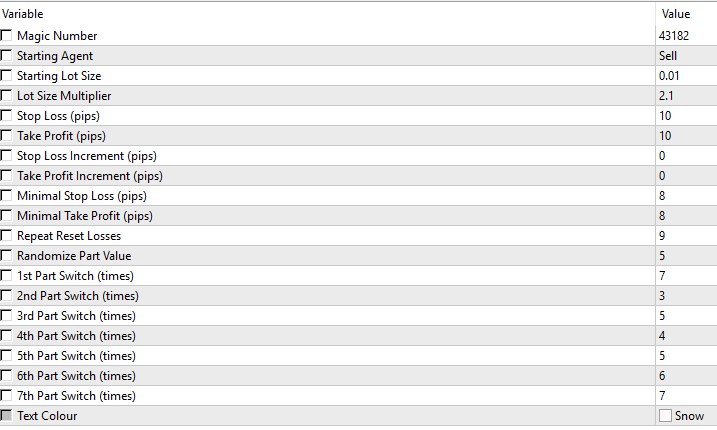
Take an existing Grid Trading EA that I currently have for MT4 and either modify it or recreate it. Delete everything below where it says " Trend Filters " Add: The ability for the EA to increase the lot size by a specific amount ( .01 or .02 or .03, ect. ) each time it adds a new position long or short Add: A profit target for the EA to reach when it will close out of all positions and start trading again or other
I have an existing MT5 Expert Advisor for XAUUSD M5. This is NOT a new robot from zero. I need modification and professional review of an existing MQL5 EA. Main goals: 1. Buy entries: Buy trades are currently too rare. The Buy ADX filter was very strict at 45. I am testing 40 now. I need you to review the Buy entry filters and improve Buy entry quality without making entries random or weak. 2. Sell entries: Sell
into Robotrader to begin: Create a fully automated Forex trading robot named Quantum Scalper. The robot must scan XAU/USD, EUR/USD, GBP/USD, USD/JPY, and NAS100 continuously. It must determine the higher-timeframe trend using H1, identify setups on M15, and execute entries on M5 or M1. Use a conservative Smart Money Concepts strategy requiring all of the following before entering a trade: market structure
Hello, i have created mt4 ea for gold but i need a skilled programmer who can polish my ea and make it real market ready with his skill and experience
I am looking for an experienced MQL5 developer to build a professional MetaTrader 5 (MT5) Expert Advisor (EA) for swing trading. Trading Pairs EUR/USD USD/JPY Timeframes Daily (D1) for trend identification. H4 for trade entries. Strategy The EA should: Detect Daily market structure (HH, HL, LH, LL) using confirmed swing highs and lows (not relying solely on ZigZag). Use DMI/ADX for trend confirmation. Open trades
JOB TITLE: XAUUSD ONLY MQL5 Strategy Developer Needed To Improve Existing MT5 EA Winrate JOB DESCRIPTION: I already have a working MetaTrader 5 Expert Advisor with a fixed set file and existing trading logic. The strategy is based on Volume Profile / Delta bias, ATR-based TP/SL, ATR deviation filtering, ATR trade spacing, break-even after TP1, and TP lock management. I am looking for an experienced MQL5 / trading
English Description (For Developers): I need a custom Expert Advisor (EA) for MT5 to trade ONLY ETHUSD based on trend-following and counter-trendline breakout-retest with an M1 execution filter and strict risk management. Trading Logic: 1. Trend Filter: Price must be below 200 EMA on both H1 and M15 timeframes for Short (Sell) trades. (Opposite for Long/Buy trades). 2. Setup: On the M15 chart, after a strong move in
Hello, I want an EA which does martingale and has hedge feature. You may be confused by what this mean entirely so reach out to me so we can talk in depth as what I have said here is very vague for someone to clearly understand. I am not paying a single dollar over $30, so don't apply if you don't agree with that. Thank you for taking your time to read this
{kind=link}
{kind=link}
{kind=link}