Operazioni con matrici e vettori in MQL5
MetaQuotes | 28 novembre, 2022
Al linguaggio MQL5 sono stati aggiunti tipi di dati speciali - matrici e vettori - per risolvere un'ampia classe di problemi matematici. I nuovi tipi offrono metodi integrati per creare codice conciso e comprensibile, vicino alla notazione matematica. In questo articolo viene fornita una breve descrizione dei metodi integrati dalla sezione guida Metodi matriciali e vettoriali.
Contenuto
- Tipi di matrici e vettori
- Creazione e inizializzazione
- Copiare matrici e array
- Copiare le serie temporali in matrici o vettori
- Operazioni con matrici e vettori
- Gestione
- Prodotti
- Trasformazioni
- Statistiche
- Caratteristiche
- Risolvere le equazioni
- Metodi di apprendimento automatico
- Miglioramenti in OpenCL
- Il futuro di MQL5 nell'Apprendimento Automatico
Ogni linguaggio di programmazione offre tipi di dati array che memorizzano insiemi di variabili numeriche, tra cui int, double e altri. L'accesso agli elementi dell’array avviene per indice, il che consente di eseguire operazioni utilizzando i cicli. I più utilizzati sono gli array monodimensionali e bidimensionali:
int a[50]; // One-dimensional array of 50 integers double m[7][50]; // Two-dimensional array of 7 subarrays, each consisting of 50 integers MyTime t[100]; // Array containing elements of MyTime type
Le capacità degli array sono di solito sufficienti per compiti relativamente semplici legati alla memorizzazione e all'elaborazione dei dati. Ma quando si tratta di problemi matematici complessi, lavorare con gli array diventa difficile sia in termini di programmazione che di lettura del codice, a causa del gran numero di cicli annidati. Anche le operazioni più semplici di algebra lineare richiedono una codifica eccessiva e una buona conoscenza della matematica.
Le moderne tecnologie dei dati, come l'apprendimento automatico, le reti neurali e la grafica 3D, utilizzano ampiamente soluzioni di algebra lineare associate ai concetti di vettori e matrici. Per facilitare le operazioni con tali oggetti, MQL5 fornisce tipi di dati speciali: matrici e vettori. I nuovi tipi eliminano molte routine nelle operazioni di programmazione e migliorano la qualità del codice.
Tipi di matrici e vettori
In breve, un vettore è un array monodimensionale di tipo double e una matrice è un array bidimensionale di tipo double. I vettori possono essere verticali e orizzontali; tuttavia, in MQL5 non sono separati.
Una matrice può essere rappresentata come un array di vettori orizzontali, in cui il primo indice è il numero di riga e il secondo indice è il numero di colonna.
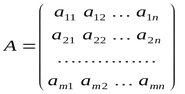
La numerazione delle righe e delle colonne inizia da 0, come per gli array.
Oltre ai tipi "matrice" e "vettore", che contengono dati di tipo double, ne esistono altri quattro tipi per le operazioni con i relativi tipi di dati:
- matrixf — una matrice contenente elementi float
- matrixc — una matrice contenente elementi complessi
- vectorf — un vettore contenente elementi di tipo float
- vectorc — un vettore contenente elementi complessi
Al momento in cui scriviamo, il lavoro sui tipi matrixc e vectorc non è ancora stato completato e quindi non è ancora possibile utilizzare questi tipi nei metodi integrati.
Le funzioni template supportano notazioni come matrice<double>, matrice<float>, vettore<double>, vettore<float> invece dei tipi corrispondenti.
vectorf v_f1= {0, 1, 2, 3,}; vector<float> v_f2=v_f1; Print("v_f2 = ", v_f2); /* v_f2 = [0,1,2,3] */
Creazione e inizializzazione
I metodi matriciali e vettoriali sono suddivisi in nove categorie in base al loro scopo. Esistono diversi modi per dichiarare e inizializzare matrici e vettori.
Il metodo di creazione più semplice è la dichiarazione senza specificazione della dimensione, cioè senza allocazione di memoria per i dati. Qui scriviamo solo il tipo di dati e il nome della variabile:
matrix matrix_a; // double type matrix matrix<double> matrix_a1; // another way to declare a double matrix, suitable for use in templates matrix<float> matrix_a3; // float type matrix vector vector_a; // double type vector vector<double> vector_a1; // another notation to create a double vector vector<float> vector_a3; // float type vector
In seguito è possibile modificare le dimensioni degli oggetti creati e riempirli con i valori desiderati. Possono anche essere utilizzati nei metodi matriciali integrati per ottenere risultati di calcolo.
Una matrice o un vettore possono essere dichiarati con la dimensione specificata, allocando la memoria per i dati ma senza inizializzare nulla. Qui, dopo il nome della variabile, specificare le dimensioni tra parentesi:
matrix matrix_a(128,128); // the parameters can be either constants matrix<double> matrix_a1(InpRows,InpCols); // or variables matrix<float> matrix_a3(InpRows,1); // analogue of a vertical vector vector vector_a(256); vector<double> vector_a1(InpSize); vector<float> vector_a3(InpSize+16); // expression can be used as a parameter
Il terzo modo per creare oggetti è dichiarare con inizializzazione. In questo caso, le dimensioni della matrice e del vettore sono determinate dalla sequenza di inizializzazione indicata tra parentesi graffe:
matrix matrix_a={{0.1,0.2,0.3},{0.4,0.5,0.6}}; matrix<double> matrix_a1=matrix_a; // the matrices must be of the same type matrix<float> matrix_a3={{1,2},{3,4}}; vector vector_a={-5,-4,-3,-2,-1,0,1,2,3,4,5}; vector<double> vector_a1={1,5,2.4,3.3}; vector<float> vector_a3=vector_a2; // the vectors must be of the same type
Esistono anche metodi statici per creare matrici e vettori della dimensione specificata, inizializzati in un certo modo:
matrix matrix_a =matrix::Eye(4,5,1); matrix<double> matrix_a1=matrix::Full(3,4,M_PI); matrixf matrix_a2=matrixf::Identity(5,5); matrixf<float> matrix_a3=matrixf::Ones(5,5); matrix matrix_a4=matrix::Tri(4,5,-1); vector vector_a =vector::Ones(256); vectorf vector_a1=vector<float>::Zeros(16); vector<float> vector_a2=vectorf::Full(128,float_value);
Inoltre, esistono metodi non statici per inizializzare una matrice o un vettore con i valori dati — Init e Fill:
matrix m(2, 2); m.Fill(10); Print("matrix m \n", m); /* matrix m [[10,10] [10,10]] */ m.Init(4, 6); Print("matrix m \n", m); /* matrix m [[10,10,10,10,0.0078125,32.00000762939453] [0,0,0,0,0,0] [0,0,0,0,0,0] [0,0,0,0,0,0]] */
In questo esempio, abbiamo usato il metodo Init per modificare le dimensioni di una matrice già inizializzata, per cui tutti i nuovi elementi sono stati riempiti con valori casuali.
Un importante vantaggio del metodo Init è la possibilità di specificare una funzione di inizializzazione nei parametri per riempire gli elementi della matrice/vettore secondo questa regola. Per esempio:
void OnStart() { //--- matrix init(3, 6, MatrixSetValues); Print("init = \n", init); /* Execution result init = [[1,2,4,8,16,32] [64,128,256,512,1024,2048] [4096,8192,16384,32768,65536,131072]] */ } //+------------------------------------------------------------------+ //| Fills the matrix with powers of a number | //+------------------------------------------------------------------+ void MatrixSetValues(matrix& m, double initial=1) { double value=initial; for(ulong r=0; r<m.Rows(); r++) { for(ulong c=0; c<m.Cols(); c++) { m[r][c]=value; value*=2; } } }
Copiare matrici e array
Le matrici e i vettori possono essere copiati utilizzando il metodo Copy. Ma un modo più semplice e familiare per copiare questi tipi di dati è quello di utilizzare l'operatore di assegnazione "=". Inoltre, è possibile utilizzare il metodo Assign per la copia.
//--- copying matrices matrix a= {{2, 2}, {3, 3}, {4, 4}}; matrix b=a+2; matrix c; Print("matrix a \n", a); Print("matrix b \n", b); c.Assign(b); Print("matrix c \n", c); /* matrix a [[2,2] [3,3] [4,4]] matrix b [[4,4] [5,5] [6,6]] matrix c [[4,4] [5,5] [6,6]] */
La differenza tra Assign e Copy è che può essere utilizzato sia per le matrici che per gli array. L'esempio seguente mostra la copia di un array di interi int_arr in una matrice double. La matrice risultante si adatta automaticamente alle dimensioni della matrice copiata.
//--- copying an array to a matrix matrix double_matrix=matrix::Full(2,10,3.14); Print("double_matrix before Assign() \n", double_matrix); int int_arr[5][5]= {{1, 2}, {3, 4}, {5, 6}}; Print("int_arr: "); ArrayPrint(int_arr); double_matrix.Assign(int_arr); Print("double_matrix after Assign(int_arr) \n", double_matrix); /* double_matrix before Assign() [[3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14] [3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14,3.14]] int_arr: [,0][,1][,2][,3][,4] [0,] 1 2 0 0 0 [1,] 3 4 0 0 0 [2,] 5 6 0 0 0 [3,] 0 0 0 0 0 [4,] 0 0 0 0 0 double_matrix after Assign(int_arr) [[1,2,0,0,0] [3,4,0,0,0] [5,6,0,0,0] [0,0,0,0,0] [0,0,0,0,0]] */ }
Il metodo Assign consente di passare senza problemi da array a matrici, con la conversione automatica delle dimensioni e del tipo.
Copiare le serie temporali in matrici o vettori
L'analisi dei grafici dei prezzi implica operazioni con gli array della struttura MqlRates. MQL5 fornisce un nuovo metodo per lavorare con queste strutture di dati del prezzo.
Il metodo CopyRates copia le serie storiche della struttura MqlRates direttamente in una matrice o in un vettore. In questo modo, si può evitare di ottenere le serie temporali richieste nei relativi array utilizzando le funzioni della sezione Accesso alle serie temporali e agli indicatori. Inoltre, non è necessario trasferirli in una matrice o in un vettore. Con il metodo CopyRates è possibile ricevere le quotazioni in una matrice o in un vettore con una sola chiamata. Consideriamo un esempio di come calcolare una matrice di correlazione per un elenco di simboli: calcoliamo questi valori utilizzando due metodi differenti e confrontiamo i risultati.
input int InBars=100; input ENUM_TIMEFRAMES InTF=PERIOD_H1; //+------------------------------------------------------------------+ //| Script program start function | //+------------------------------------------------------------------+ void OnStart() { //--- list of symbols for calculation string symbols[]= {"EURUSD", "GBPUSD", "USDJPY", "USDCAD", "USDCHF"}; int size=ArraySize(symbols); //--- matrix and vector to receive Close prices matrix rates(InBars, size); vector close; for(int i=0; i<size; i++) { //--- get Close prices to a vector if(close.CopyRates(symbols[i], InTF, COPY_RATES_CLOSE, 1, InBars)) { //--- insert the vector to the timeseries matrix rates.Col(close, i); PrintFormat("%d. %s: %d Close prices were added to matrix", i+1, symbols[i], close.Size()); //--- output the first 20 vector values for debugging int digits=(int)SymbolInfoInteger(symbols[i], SYMBOL_DIGITS); Print(VectorToString(close, 20, digits)); } else { Print("vector.CopyRates(%d,COPY_RATES_CLOSE) failed. Error ", symbols[i], GetLastError()); return; } } /* 1. EURUSD: 100 Close prices were added to the matrix 0.99561 0.99550 0.99674 0.99855 0.99695 0.99555 0.99732 1.00305 1.00121 1.069 0.99936 1.027 1.00130 1.00129 1.00123 1.00201 1.00222 1.00111 1.079 1.030 ... 2. GBPUSD: 100 Close prices were added to the matrix 1.13733 1.13708 1.13777 1.14045 1.13985 1.13783 1.13945 1.14315 1.14172 1.13974 1.13868 1.14116 1.14239 1.14230 1.14160 1.14281 1.14338 1.14242 1.14147 1.14069 ... 3. USDJPY: 100 Close prices were added to the matrix 143.451 143.356 143.310 143.202 143.079 143.294 143.146 142.963 143.039 143.032 143.039 142.957 142.904 142.956 142.920 142.837 142.756 142.928 143.130 143.069 ... 4. USDCAD: 100 Close prices were added to the matrix 1.32840 1.32877 1.32838 1.32660 1.32780 1.33068 1.33001 1.32798 1.32730 1.32782 1.32951 1.32868 1.32716 1.32663 1.32629 1.32614 1.32586 1.32578 1.32650 1.32789 ... 5. USDCHF: 100 Close prices were added to the matrix 0.96395 0.96440 0.96315 0.96161 0.96197 0.96337 0.96358 0.96228 0.96474 0.96529 0.96529 0.96502 0.96463 0.96429 0.96378 0.96377 0.96314 0.96428 0.96483 0.96509 ... */ //--- prepare a matrix of correlations between symbols matrix corr_from_vector=matrix::Zeros(size, size); Print("Compute pairwise correlation coefficients"); for(int i=0; i<size; i++) { for(int k=i; k<size; k++) { vector v1=rates.Col(i); vector v2=rates.Col(k); double coeff = v1.CorrCoef(v2); PrintFormat("corr(%s,%s) = %.3f", symbols[i], symbols[k], coeff); corr_from_vector[i][k]=coeff; } } Print("Correlation matrix on vectors: \n", corr_from_vector); /* Calculate pairwise correlation coefficients corr(EURUSD,EURUSD) = 1.000 corr(EURUSD,GBPUSD) = 0.974 corr(EURUSD,USDJPY) = -0.713 corr(EURUSD,USDCAD) = -0.950 corr(EURUSD,USDCHF) = -0.397 corr(GBPUSD,GBPUSD) = 1.000 corr(GBPUSD,USDJPY) = -0.744 corr(GBPUSD,USDCAD) = -0.953 corr(GBPUSD,USDCHF) = -0.362 corr(USDJPY,USDJPY) = 1.000 corr(USDJPY,USDCAD) = 0.736 corr(USDJPY,USDCHF) = 0.083 corr(USDCAD,USDCAD) = 1.000 corr(USDCAD,USDCHF) = 0.425 corr(USDCHF,USDCHF) = 1.000 Correlation matrix on vectors: [[1,0.9736363791537366,-0.7126365191640618,-0.9503129578410202,-0.3968181226230434] [0,1,-0.7440448047501974,-0.9525190338388175,-0.3617774666815978] [0,0,1,0.7360546499847362,0.08314381248168941] [0,0,0,0.9999999999999999,0.4247042496841555] [0,0,0,0,1]] */ //--- now let's see how a correlation matrix can be calculated in one line matrix corr_from_matrix=rates.CorrCoef(false); // false means that the vectors are in the matrix columns Print("Correlation matrix rates.CorrCoef(false): \n", corr_from_matrix.TriU()); //--- compare the resulting matrices to find discrepancies Print("How many discrepancy errors between result matrices?"); ulong errors=corr_from_vector.Compare(corr_from_matrix.TriU(), (float)1e-12); Print("corr_from_vector.Compare(corr_from_matrix,1e-12)=", errors); /* Correlation matrix rates.CorrCoef(false): [[1,0.9736363791537366,-0.7126365191640618,-0.9503129578410202,-0.3968181226230434] [0,1,-0.7440448047501974,-0.9525190338388175,-0.3617774666815978] [0,0,1,0.7360546499847362,0.08314381248168941] [0,0,0,1,0.4247042496841555] [0,0,0,0,1]] How many discrepancy errors between result matrices? corr_from_vector.Compare(corr_from_matrix,1e-12)=0 */ //--- create a nice output of the correlation matrix Print("Output the correlation matrix with headers"); string header=" "; // header for(int i=0; i<size; i++) header+=" "+symbols[i]; Print(header); //--- now rows for(int i=0; i<size; i++) { string line=symbols[i]+" "; line+=VectorToString(corr_from_vector.Row(i), size, 3, 8); Print(line); } /* Output the correlation matrix with headers EURUSD GBPUSD USDJPY USDCAD USDCHF EURUSD 1.0 0.974 -0.713 -0.950 -0.397 GBPUSD 0.0 1.0 -0.744 -0.953 -0.362 USDJPY 0.0 0.0 1.0 0.736 0.083 USDCAD 0.0 0.0 0.0 1.0 0.425 USDCHF 0.0 0.0 0.0 0.0 1.0 */ } //+------------------------------------------------------------------+ //| Returns a string with vector values | //+------------------------------------------------------------------+ string VectorToString(const vector &v, int length=20, int digits=5, int width=8) { ulong size=(ulong)MathMin(20, v.Size()); //--- compose a string string line=""; for(ulong i=0; i<size; i++) { string value=DoubleToString(v[i], digits); StringReplace(value, ".000", ".0"); line+=Indent(width-StringLen(value))+value; } //--- add a tail if the vector length exceeds the specified size if(v.Size()>size) line+=" ..."; //--- return(line); } //+------------------------------------------------------------------+ //| Returns a string with the specified number of spaces | //+------------------------------------------------------------------+ string Indent(int number) { string indent=""; for(int i=0; i<number; i++) indent+=" "; return(indent); }
L'esempio mostra come:
- Ottenere i prezzi delle Chiusure utilizzando CopyRates
- Inserire un vettore in una matrice utilizzando il metodo Col
- Calcolare il coefficiente di correlazione tra due vettori utilizzando CorrCoef
- Calcolare la matrice di correlazione su una matrice con valori di vettori usando CorrCoef
- Restituire una matrice triangolare superiore usando il metodo TriU
- Confrontare due matrici e trovare le discrepanze usando Compare
Operazioni con matrici e vettori
Le operazioni matematiche elementari di addizione, sottrazione, moltiplicazione e divisione possono essere eseguite su matrici e vettori. Entrambi gli oggetti in queste operazioni devono essere dello stesso tipo e avere le stesse dimensioni. Ogni elemento della matrice o del vettore opera sul corrispondente elemento della seconda matrice o del vettore.
È inoltre possibile utilizzare uno scalare del tipo appropriato (double, float o complex) come secondo termine (moltiplicatore, sottraendo o divisore). In questo caso, ogni membro della matrice o del vettore opererà sullo scalare specificato.
matrix matrix_a={{0.1,0.2,0.3},{0.4,0.5,0.6}}; matrix matrix_b={{1,2,3},{4,5,6}}; matrix matrix_c1=matrix_a+matrix_b; matrix matrix_c2=matrix_b-matrix_a; matrix matrix_c3=matrix_a*matrix_b; // Hadamard product matrix matrix_c4=matrix_b/matrix_a; matrix_c1=matrix_a+1; matrix_c2=matrix_b-double_value; matrix_c3=matrix_a*M_PI; matrix_c4=matrix_b/0.1; //--- operations in place are possible matrix_a+=matrix_b; matrix_a/=2;
Inoltre, matrici e vettori possono essere passati come secondo parametro alla maggior parte delle funzioni matematiche, tra cui MathAbs, MathArccos, MathArcsin, MathArctan, MathCeil, MathCos, MathExp, MathFloor, MathLog, MathLog10, MathMod, MathPow, MathRound, MathSin, MathSqrt, MathTan, MathExpm1, MathLog1p, MathArccosh, MathArcsinh, MathArctanh, MathCosh, MathSinh, MathTanh. Queste operazioni permettono la gestione di matrici o vettori in base agli elementi. Esempio:
//--- matrix a= {{1, 4}, {9, 16}}; Print("matrix a=\n",a); a=MathSqrt(a); Print("MatrSqrt(a)=\n",a); /* matrix a= [[1,4] [9,16]] MatrSqrt(a)= [[1,2] [3,4]] */
Per MathMod e MathPow, il secondo elemento può essere sia uno scalare o una matrice/vettore di dimensioni appropriate.
matrix<T> mat1(128,128); matrix<T> mat3(mat1.Rows(),mat1.Cols()); ulong n,size=mat1.Rows()*mat1.Cols(); ... mat2=MathPow(mat1,(T)1.9); for(n=0; n<size; n++) { T res=MathPow(mat1.Flat(n),(T)1.9); if(res!=mat2.Flat(n)) errors++; } mat2=MathPow(mat1,mat3); for(n=0; n<size; n++) { T res=MathPow(mat1.Flat(n),mat3.Flat(n)); if(res!=mat2.Flat(n)) errors++; } ... vector<T> vec1(16384); vector<T> vec3(vec1.Size()); ulong n,size=vec1.Size(); ... vec2=MathPow(vec1,(T)1.9); for(n=0; n<size; n++) { T res=MathPow(vec1[n],(T)1.9); if(res!=vec2[n]) errors++; } vec2=MathPow(vec1,vec3); for(n=0; n<size; n++) { T res=MathPow(vec1[n],vec3[n]); if(res!=vec2[n]) errors++; }
Manipolazioni
MQL5 supporta le seguenti manipolazioni di base su matrici e vettori, che non richiedono alcun calcolo:
- Trasposizione
- Estrazione di righe, colonne e diagonali
- Ridimensionamento e rimodellamento delle matrici
- Scambiare le righe e le colonne specificate
- Copia in un nuovo oggetto
- Confronto tra due oggetti
- Suddivisione di una matrice in più sottomatrici
- Ordinamento
matrix a= {{0, 1, 2}, {3, 4, 5}}; Print("matrix a \n", a); Print("a.Transpose() \n", a.Transpose()); /* matrix a [[0,1,2] [3,4,5]] a.Transpose() [[0,3] [1,4] [2,5]] */
Di seguito sono riportati alcuni esempi che mostrano come impostare ed estrarre una diagonale utilizzando il metodo Diag:
vector v1={1,2,3}; matrix m1; m1.Diag(v1); Print("m1\n",m1); /* m1 [[1,0,0] [0,2,0] [0,0,3]] m2 */ matrix m2; m2.Diag(v1,-1); Print("m2\n",m2); /* m2 [[0,0,0] [1,0,0] [0,2,0] [0,0,3]] */ matrix m3; m3.Diag(v1,1); Print("m3\n",m3); /* m3 [[0,1,0,0] [0,0,2,0] [0,0,0,3]] */ matrix m4=matrix::Full(4,5,9); m4.Diag(v1,1); Print("m4\n",m4); Print("diag -1 - ",m4.Diag(-1)); Print("diag 0 - ",m4.Diag()); Print("diag 1 - ",m4.Diag(1)); /* m4 [[9,1,9,9,9] [9,9,2,9,9] [9,9,9,3,9] [9,9,9,9,9]] diag -1 - [9,9,9] diag 0 - [9,9,9,9] diag 1 - [1,2,3,9] */
Modifica delle dimensioni di una matrice usando il metodo Reshape:
matrix matrix_a={{1,2,3},{4,5,6},{7,8,9},{10,11,12}}; Print("matrix_a\n",matrix_a); /* matrix_a [[1,2,3] [4,5,6] [7,8,9] [10,11,12]] */ matrix_a.Reshape(2,6); Print("Reshape(2,6)\n",matrix_a); /* Reshape(2,6) [[1,2,3,4,5,6] [7,8,9,10,11,12]] */ matrix_a.Reshape(3,5); Print("Reshape(3,5)\n",matrix_a); /* Reshape(3,5) [[1,2,3,4,5] [6,7,8,9,10] [11,12,0,3,0]] */ matrix_a.Reshape(2,4); Print("Reshape(2,4)\n",matrix_a); /* Reshape(2,4) [[1,2,3,4] [5,6,7,8]] */
Esempi di divisione verticale di una matrice con il metodo Vsplit:
matrix matrix_a={{ 1, 2, 3, 4, 5, 6}, { 7, 8, 9,10,11,12}, {13,14,15,16,17,18}}; matrix splitted[]; ulong parts[]={2,3}; matrix_a.Vsplit(2,splitted); for(uint i=0; i<splitted.Size(); i++) Print("splitted ",i,"\n",splitted[i]); /* splitted 0 [[1,2,3] [7,8,9] [13,14,15]] splitted 1 [[4,5,6] [10,11,12] [16,17,18]] */ matrix_a.Vsplit(3,splitted); for(uint i=0; i<splitted.Size(); i++) Print("splitted ",i,"\n",splitted[i]); /* splitted 0 [[1,2] [7,8] [13,14]] splitted 1 [[3,4] [9,10] [15,16]] splitted 2 [[5,6] [11,12] [17,18]] */ matrix_a.Vsplit(parts,splitted); for(uint i=0; i<splitted.Size(); i++) Print("splitted ",i,"\n",splitted[i]); /* splitted 0 [[1,2] [7,8] [13,14]] splitted 1 [[3,4,5] [9,10,11] [15,16,17]] splitted 2 [[6] [12] [18]] */
I metodi Col e Row consentono di ottenere gli elementi della matrice in questione e di inserire elementi in matrici non allocate, ossia matrici senza la dimensione specificata. Ecco un esempio:
vector v1={1,2,3}; matrix m1; m1.Col(v1,1); Print("m1\n",m1); /* m1 [[0,1] [0,2] [0,3]] */ matrix m2=matrix::Full(4,5,8); m2.Col(v1,2); Print("m2\n",m2); /* m2 [[8,8,1,8,8] [8,8,2,8,8] [8,8,3,8,8] [8,8,8,8,8]] */ Print("col 1 - ",m2.Col(1)); /* col 1 - [8,8,8,8] */ Print("col 2 - ",m2.Col(2)); /* col 1 - [8,8,8,8] col 2 - [1,2,3,8] */
Prodotti
La moltiplicazione delle matrici è uno degli algoritmi di base ampiamente utilizzati nei metodi numerici. Molte implementazioni degli algoritmi di forward e back-propagation nelle reti neurali convoluzionali si basano su questa operazione. Spesso il 90-95% di tutto il tempo dedicato all'apprendimento automatico è preso da questa operazione. Tutti i metodi sul prodotto sono forniti nella sezione Prodotti di matrici e vettori della guida del linguaggio.
L'esempio seguente mostra la moltiplicazione di due matrici utilizzando il metodo MatMul:
matrix a={{1, 0, 0}, {0, 1, 0}}; matrix b={{4, 1}, {2, 2}, {1, 3}}; matrix c1=a.MatMul(b); matrix c2=b.MatMul(a); Print("c1 = \n", c1); Print("c2 = \n", c2); /* c1 = [[4,1] [2,2]] c2 = [[4,1,0] [2,2,0] [1,3,0]] */
Un esempio del prodotto di Kronecker di due matrici o di una matrice e di un vettore, utilizzando il metodo Kron.
matrix a={{1,2,3},{4,5,6}}; matrix b=matrix::Identity(2,2); vector v={1,2}; Print(a.Kron(b)); Print(a.Kron(v)); /* [[1,0,2,0,3,0] [0,1,0,2,0,3] [4,0,5,0,6,0] [0,4,0,5,0,6]] [[1,2,2,4,3,6] [4,8,5,10,6,12]] */
Altri esempi tratti dall'articolo Matrici e vettori in MQL5:
//--- initialize matrices matrix m35, m52; m35.Init(3,5,Arange); m52.Init(5,2,Arange); //--- Print("1. Product of horizontal vector v[3] and matrix m[3,5]"); vector v3 = {1,2,3}; Print("On the left v3 = ",v3); Print("On the right m35 = \n",m35); Print("v3.MatMul(m35) = horizontal vector v[5] \n",v3.MatMul(m35)); /* 1. Product of horizontal vector v[3] and matrix m[3,5] On the left v3 = [1,2,3] On the right m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] v3.MatMul(m35) = horizontal vector v[5] [40,46,52,58,64] */ //--- show that this is really a horizontal vector Print("\n2. Product of matrix m[1,3] and matrix m[3,5]"); matrix m13; m13.Init(1,3,Arange,1); Print("On the left m13 = \n",m13); Print("On the right m35 = \n",m35); Print("m13.MatMul(m35) = matrix m[1,5] \n",m13.MatMul(m35)); /* 2. Product of matrix m[1,3] and matrix m[3,5] On the left m13 = [[1,2,3]] On the right m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] m13.MatMul(m35) = matrix m[1,5] [[40,46,52,58,64]] */ Print("\n3. Product of matrix m[3,5] and vertical vector v[5]"); vector v5 = {1,2,3,4,5}; Print("On the left m35 = \n",m35); Print("On the right v5 = ",v5); Print("m35.MatMul(v5) = vertical vector v[3] \n",m35.MatMul(v5)); /* 3. Product of matrix m[3,5] and vertical vector v[5] On the left m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] On the right v5 = [1,2,3,4,5] m35.MatMul(v5) = vertical vector v[3] [40,115,190] */ //--- show that this is really a vertical vector Print("\n4. Product of matrix m[3,5] and matrix m[5,1]"); matrix m51; m51.Init(5,1,Arange,1); Print("On the left m35 = \n",m35); Print("On the right m51 = \n",m51); Print("m35.MatMul(m51) = matrix v[3] \n",m35.MatMul(m51)); /* 4. Product of matrix m[3,5] and matrix m[5,1] On the left m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] On the right m51 = [[1] [2] [3] [4] [5]] m35.MatMul(m51) = matrix v[3] [[40] [115] [190]] */ Print("\n5. Product of matrix m[3,5] and matrix m[5,2]"); Print("On the left m35 = \n",m35); Print("On the right m52 = \n",m52); Print("m35.MatMul(m52) = matrix m[3,2] \n",m35.MatMul(m52)); /* 5. Product of matrix m[3,5] and matrix m[5,2] On the left m35 = [[0,1,2,3,4] [5,6,7,8,9] [10,11,12,13,14]] On the right m52 = [[0,1] [2,3] [4,5] [6,7] [8,9]] m35.MatMul(m52) = matrix m[3,2] [[60,70] [160,195] [260,320]] */ Print("\n6. Product of horizontal vector v[5] and matrix m[5,2]"); Print("On the left v5 = \n",v5); Print("On the right m52 = \n",m52); Print("v5.MatMul(m52) = horizontal vector v[2] \n",v5.MatMul(m52)); /* 6. The product of horizontal vector v[5] and matrix m[5,2] On the left v5 = [1,2,3,4,5] On the right m52 = [[0,1] [2,3] [4,5] [6,7] [8,9]] v5.MatMul(m52) = horizontal vector v[2] [80,95] */ Print("\n7. Outer() product of horizontal vector v[5] and vertical vector v[3]"); Print("On the left v5 = \n",v5); Print("On the right v3 = \n",v3); Print("v5.Outer(v3) = matrix m[5,3] \n",v5.Outer(v3)); /* 7. Outer() product of horizontal vector v[5] and vertical vector v[3] On the left v5 = [1,2,3,4,5] On the right v3 = [1,2,3] v5.Outer(v3) = matrix m[5,3] [[1,2,3] [2,4,6] [3,6,9] [4,8,12] [5,10,15]] */
Trasformazioni
Le trasformazioni matriciali sono spesso utilizzate nelle operazioni sui dati. Tuttavia, molte operazioni matriciali complesse non possono essere risolte in modo efficiente o stabile a causa della limitata precisione dei computer.
Le trasformazioni (o scomposizioni) di matrici sono metodi che riducono una matrice nelle sue parti componenti, rendendo facile il calcolo di operazioni matriciali più complesse. I metodi di decomposizione delle matrici, detti anche metodi di fattorizzazione delle matrici, sono la spina dorsale dell'algebra lineare nei computer, anche per operazioni di base come la risoluzione di sistemi di equazioni lineari, il calcolo dell'inversa e il calcolo del determinante di una matrice.
L'apprendimento automatico utilizza ampiamente la Decomposizione ai Valori Singolari (SVD), che consente di rappresentare la matrice originale come il prodotto di altre tre matrici. La SVD viene utilizzata per risolvere una serie di problemi, dall'approssimazione ai minimi quadrati alla compressione e al riconoscimento delle immagini.
Un esempio di Decomposizione ai Valori Singolari con il metodo SVD:
matrix a= {{0, 1, 2, 3, 4, 5, 6, 7, 8}}; a=a-4; Print("matrix a \n", a); a.Reshape(3, 3); matrix b=a; Print("matrix b \n", b); //--- execute SVD decomposition matrix U, V; vector singular_values; b.SVD(U, V, singular_values); Print("U \n", U); Print("V \n", V); Print("singular_values = ", singular_values); // check block //--- U * singular diagonal * V = A matrix matrix_s; matrix_s.Diag(singular_values); Print("matrix_s \n", matrix_s); matrix matrix_vt=V.Transpose(); Print("matrix_vt \n", matrix_vt); matrix matrix_usvt=(U.MatMul(matrix_s)).MatMul(matrix_vt); Print("matrix_usvt \n", matrix_usvt); ulong errors=(int)b.Compare(matrix_usvt, 1e-9); double res=(errors==0); Print("errors=", errors); //---- another check matrix U_Ut=U.MatMul(U.Transpose()); Print("U_Ut \n", U_Ut); Print("Ut_U \n", (U.Transpose()).MatMul(U)); matrix vt_V=matrix_vt.MatMul(V); Print("vt_V \n", vt_V); Print("V_vt \n", V.MatMul(matrix_vt)); /* matrix a [[-4,-3,-2,-1,0,1,2,3,4]] matrix b [[-4,-3,-2] [-1,0,1] [2,3,4]] U [[-0.7071067811865474,0.5773502691896254,0.408248290463863] [-6.827109697437648e-17,0.5773502691896253,-0.8164965809277256] [0.7071067811865472,0.5773502691896255,0.4082482904638627]] V [[0.5773502691896258,-0.7071067811865474,-0.408248290463863] [0.5773502691896258,1.779939029415334e-16,0.8164965809277258] [0.5773502691896256,0.7071067811865474,-0.408248290463863]] singular_values = [7.348469228349533,2.449489742783175,3.277709923350408e-17] matrix_s [[7.348469228349533,0,0] [0,2.449489742783175,0] [0,0,3.277709923350408e-17]] matrix_vt [[0.5773502691896258,0.5773502691896258,0.5773502691896256] [-0.7071067811865474,1.779939029415334e-16,0.7071067811865474] [-0.408248290463863,0.8164965809277258,-0.408248290463863]] matrix_usvt [[-3.999999999999997,-2.999999999999999,-2] [-0.9999999999999981,-5.977974170712231e-17,0.9999999999999974] [2,2.999999999999999,3.999999999999996]] errors=0 U_Ut [[0.9999999999999993,-1.665334536937735e-16,-1.665334536937735e-16] [-1.665334536937735e-16,0.9999999999999987,-5.551115123125783e-17] [-1.665334536937735e-16,-5.551115123125783e-17,0.999999999999999]] Ut_U [[0.9999999999999993,-5.551115123125783e-17,-1.110223024625157e-16] [-5.551115123125783e-17,0.9999999999999987,2.498001805406602e-16] [-1.110223024625157e-16,2.498001805406602e-16,0.999999999999999]] vt_V [[1,-5.551115123125783e-17,0] [-5.551115123125783e-17,0.9999999999999996,1.110223024625157e-16] [0,1.110223024625157e-16,0.9999999999999996]] V_vt [[0.9999999999999999,1.110223024625157e-16,1.942890293094024e-16] [1.110223024625157e-16,0.9999999999999998,1.665334536937735e-16] [1.942890293094024e-16,1.665334536937735e-16,0.9999999999999996] */ }
Un'altra trasformazione comunemente usata è la decomposizione di Cholesky, che può essere utilizzata per risolvere un sistema di equazioni lineari Ax=b se la matrice A è simmetrica e definita positivamente.
In MQL5, la decomposizione di Cholesky viene eseguita con il metodo Cholesky:
matrix matrix_a= {{5.7998084, -2.1825367}, {-2.1825367, 9.85910595}}; matrix matrix_l; Print("matrix_a\n", matrix_a); matrix_a.Cholesky(matrix_l); Print("matrix_l\n", matrix_l); Print("check\n", matrix_l.MatMul(matrix_l.Transpose())); /* matrix_a [[5.7998084,-2.1825367] [-2.1825367,9.85910595]] matrix_l [[2.408279136645086,0] [-0.9062640068544704,3.006291985133859]] check [[5.7998084,-2.1825367] [-2.1825367,9.85910595]] */
La tabella seguente mostra l'elenco dei metodi disponibili:
| Funzione | Azione |
|---|---|
| Calcola la decomposizione di Cholesky | |
| Calcola gli autovalori e gli autovettori destri di una matrice quadrata | |
| Calcola gli autovalori di una matrice generale | |
| Fattorizzazione LU di una matrice come prodotto di una matrice triangolare inferiore e di una matrice triangolare superiore | |
| Fattorizzazione LUP con pivoting parziale, che si riferisce alla decomposizione LU con le sole permutazioni di riga: PA=LU | |
| Calcolo della fattorizzazione qr di una matrice | |
| Decomposizione ai Valori Singolari |
Ottenere statistiche
- Valori massimi e minimi, insieme ai relativi indici in una matrice/vettore
- La somma e il prodotto degli elementi, come la somma e il prodotto cumulativo
- Mediana, media, media aritmetica e media aritmetica ponderata dei valori della matrice/vettore
- Deviazione standard e varianza degli elementi
- Percentili e quantili
- Metrica dei regressori come errore di deviazione dalla linea di regressione costruita sull'array di dati specificato.
Un esempio di calcolo della deviazione standard con il metodo Std:
matrixf matrix_a={{10,3,2},{1,8,12},{6,5,4},{7,11,9}};
Print("matrix_a\n",matrix_a);
vectorf cols_std=matrix_a.Std(0);
vectorf rows_std=matrix_a.Std(1);
float matrix_std=matrix_a.Std();
Print("cols_std ",cols_std);
Print("rows_std ",rows_std);
Print("std value ",matrix_std);
/*
matrix_a
[[10,3,2]
[1,8,12]
[6,5,4]
[7,11,9]]
cols_std [3.2403703,3.0310888,3.9607449]
rows_std [3.5590262,4.5460606,0.81649661,1.6329932]
std value 3.452052593231201
*/
Calcolo dei quantili con il metodo dei Quantile:
matrixf matrix_a={{1,2,3},{4,5,6},{7,8,9},{10,11,12}};
Print("matrix_a\n",matrix_a);
vectorf cols_percentile=matrix_a.Percentile(50,0);
vectorf rows_percentile=matrix_a.Percentile(50,1);
float matrix_percentile=matrix_a.Percentile(50);
Print("cols_percentile ",cols_percentile);
Print("rows_percentile ",rows_percentile);
Print("percentile value ",matrix_percentile);
/*
matrix_a
[[1,2,3]
[4,5,6]
[7,8,9]
[10,11,12]]
cols_percentile [5.5,6.5,7.5]
rows_percentile [2,5,8,11]
percentile value 6.5
*/
Caratteristiche della matrice
Utilizzare i metodi della sezione Caratteristiche per ottenere i seguenti valori:
- Il numero di righe e colonne di una matrice
- Numero di norma e condizione
- Determinante, rango, traccia e spettro di una matrice
Calcolo del rango di una matrice con il metodo Rank:
matrix a=matrix::Eye(4, 4);; Print("matrix a \n", a); Print("a.Rank()=", a.Rank()); matrix I=matrix::Eye(4, 4); I[3, 3] = 0.; // matrix deficit Print("I \n", I); Print("I.Rank()=", I.Rank()); matrix b=matrix::Ones(1, 4); Print("b \n", b); Print("b.Rank()=", b.Rank());;// 1 size - rank 1, unless all 0 matrix zeros=matrix::Zeros(4, 1); Print("zeros \n", zeros); Print("zeros.Rank()=", zeros.Rank()); /* matrix a [[1,0,0,0] [0,1,0,0] [0,0,1,0] [0,0,0,1]] a.Rank()=4 I [[1,0,0,0] [0,1,0,0] [0,0,1,0] [0,0,0,0]] I.Rank()=3 b [[1,1,1,1]] b.Rank()=1 zeros [[0] [0] [0] [0]] zeros.Rank()=0 */
Calcolo di una norma con il metodo Norm:
matrix a= {{0, 1, 2, 3, 4, 5, 6, 7, 8}}; a=a-4; Print("matrix a \n", a); a.Reshape(3, 3); matrix b=a; Print("matrix b \n", b); Print("b.Norm(MATRIX_NORM_P2)=", b.Norm(MATRIX_NORM_FROBENIUS)); Print("b.Norm(MATRIX_NORM_FROBENIUS)=", b.Norm(MATRIX_NORM_FROBENIUS)); Print("b.Norm(MATRIX_NORM_INF)", b.Norm(MATRIX_NORM_INF)); Print("b.Norm(MATRIX_NORM_MINUS_INF)", b.Norm(MATRIX_NORM_MINUS_INF)); Print("b.Norm(MATRIX_NORM_P1)=)", b.Norm(MATRIX_NORM_P1)); Print("b.Norm(MATRIX_NORM_MINUS_P1)=", b.Norm(MATRIX_NORM_MINUS_P1)); Print("b.Norm(MATRIX_NORM_P2)=", b.Norm(MATRIX_NORM_P2)); Print("b.Norm(MATRIX_NORM_MINUS_P2)=", b.Norm(MATRIX_NORM_MINUS_P2)); /* matrix a [[-4,-3,-2,-1,0,1,2,3,4]] matrix b [[-4,-3,-2] [-1,0,1] [2,3,4]] b.Norm(MATRIX_NORM_P2)=7.745966692414834 b.Norm(MATRIX_NORM_FROBENIUS)=7.745966692414834 b.Norm(MATRIX_NORM_INF)9.0 b.Norm(MATRIX_NORM_MINUS_INF)2.0 b.Norm(MATRIX_NORM_P1)=)7.0 b.Norm(MATRIX_NORM_MINUS_P1)=6.0 b.Norm(MATRIX_NORM_P2)=7.348469228349533 b.Norm(MATRIX_NORM_MINUS_P2)=1.857033188519056e-16 */
Risolvere le equazioni
I metodi di apprendimento automatico e i problemi di ottimizzazione richiedono spesso di trovare soluzioni a un sistema di equazioni lineari. La sezione Soluzioni contiene quattro metodi che consentono di risolvere queste equazioni a seconda del tipo di matrice.
| Funzione | Azione |
|---|---|
| Risolve un'equazione matriciale lineare o un sistema di equazioni algebriche lineari. | |
| Restituisce la soluzione ai minimi quadrati di equazioni algebriche lineari (per matrici non quadrate o degenerate) | |
| Calcolo dell'inversa moltiplicativa di una matrice quadrata invertibile con il metodo di Jordan-Gauss | |
| Calcolo della pseudo-inversa di una matrice con il metodo di Moore-Penrose |

Dobbiamo trovare il vettore di soluzioni x. La matrice A non è quadrata e quindi il metodo Solve non può essere utilizzato qui.
Utilizzeremo il metodo LstSq che consente di risolvere approssimativamente matrici non quadrate o degenerate.matrix a={{3, 2}, {4,-5}, {3, 3}}; vector b={7,40,3}; //--- solve the system A*x = b vector x=a.LstSq(b); //--- check the solution, x must be equal to [5, -4] Print("x=", x); /* x=[5.00000000,-4] */ //--- check A*x = b1, the resulting vector must be [7, 40, 3] vector b1=a.MatMul(x); Print("b11=",b1); /* b1=[7.0000000,40.0000000,3.00000000] */
La verifica ha dimostrato che il vettore x trovato è la soluzione di questo sistema di equazioni.
Metodi di apprendimento automatico
Esistono tre metodi matriciali e vettoriali che possono essere utilizzati nell'apprendimento automatico.
| Funzione | Azione |
|---|---|
| Calcola i valori della funzione di attivazione e li scrive nel vettore/matrice passato | |
| Calcola i valori della derivata della funzione di attivazione e li scrive nel vettore/matrice passato | |
| Calcola i valori della funzione di perdita e li scrive nel vettore/matrice passato |
Le funzioni di attivazione sono utilizzate nelle reti neurali per trovare un'uscita che dipende dalla somma ponderata degli ingressi. La selezione della funzione di attivazione ha un impatto significativo sulle prestazioni della rete neurale.
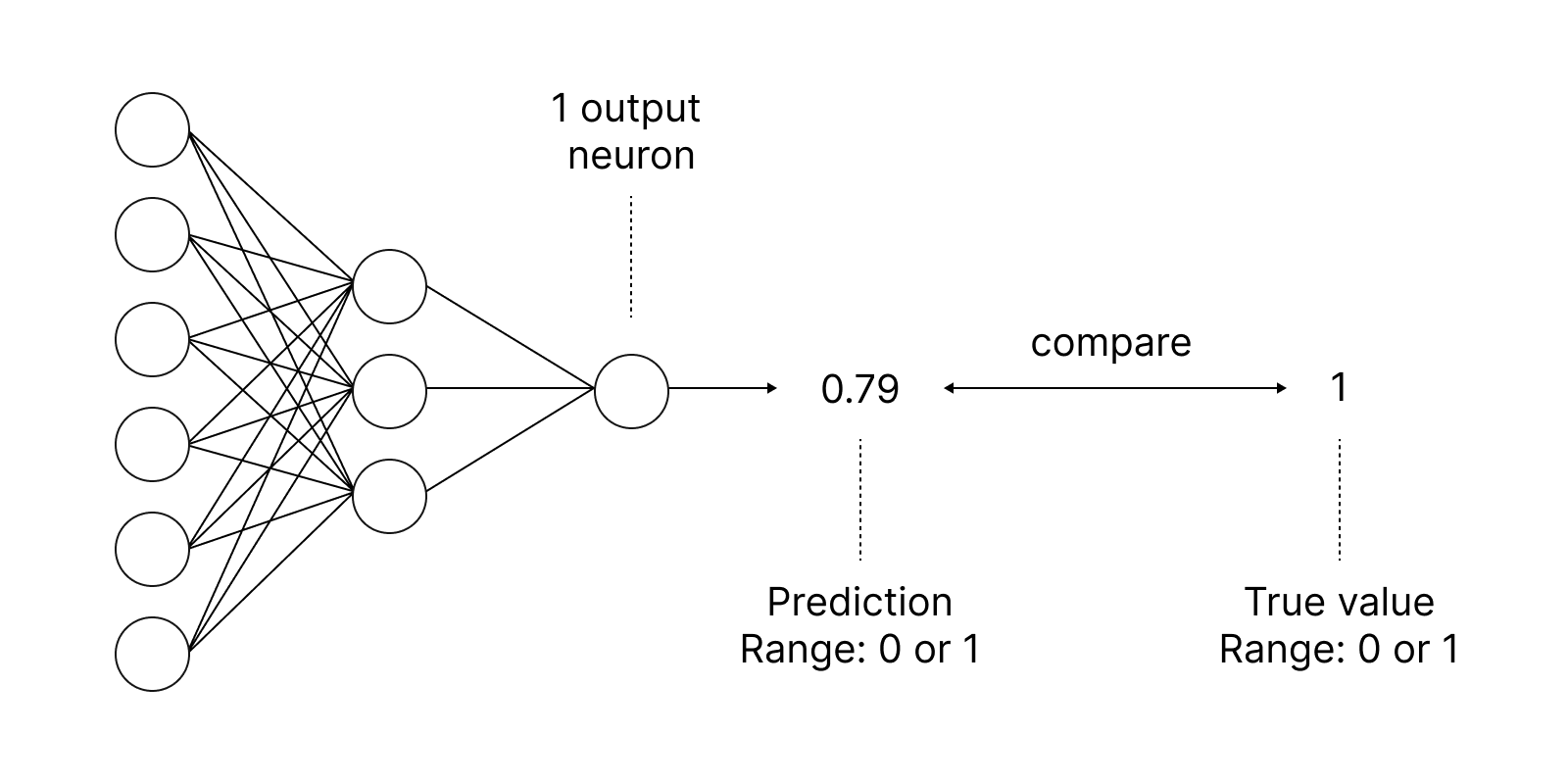
Una delle funzioni di attivazione più conosciuta è la sigmoide.
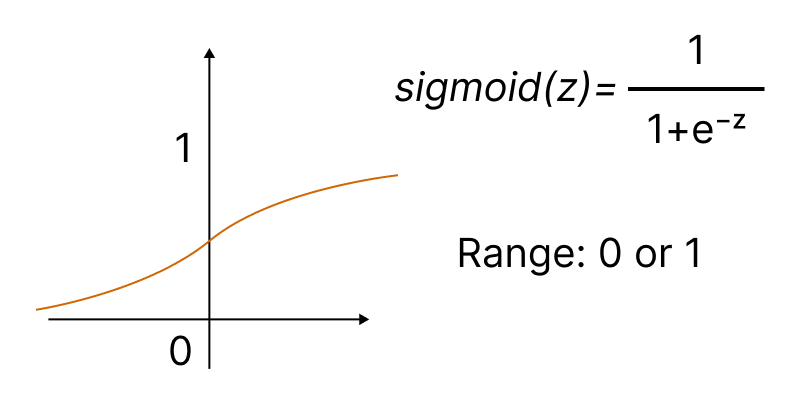
Il metodo integrato Activation consente di impostare uno dei quindici tipi di funzione di attivazione. Sono tutte disponibili nell'enumerazione ENUM_ACTIVATION_FUNCTION.
| ID | Descrizione |
|---|---|
| AF_ELU | Unità Lineare Esponenziale |
| AF_EXP | Esponenziale |
| AF_GELU | Unità Lineare Errore Gaussiano |
| AF_HARD_SIGMOID | Sigmoide Rigido |
| AF_LINEAR | Lineare |
| AF_LRELU | Unità Lineare Rettificata Leaky |
| AF_RELU | Unità lineare rettificata |
| AF_SELU | Unità Lineare Esponenziale Scalata |
| AF_SIGMOID | Sigmoide |
| AF_SOFTMAX | Softmax |
| AF_SOFTPLUS | Softplus |
| AF_SOFTSIGN | Softsign |
| AF_SWISH | Swish |
| AF_TANH | Funzione tangente iperbolica |
| AF_TRELU | Unità Lineare Rettificata con soglia |
Una rete neurale mira a trovare un algoritmo che minimizzi l'errore nell’apprendimento, per il quale viene utilizzata la funzione di perdita. La deviazione viene calcolata con il metodo Loss, per il quale è possibile specificare uno dei quattordici tipi dell'enumerazione ENUM_LOSS_FUNCTION.
I valori della deviazione risultanti vengono poi utilizzati per affinare i parametri della rete neurale. Questo viene fatto utilizzando il metodo Derivative, che calcola i valori della derivata della funzione di attivazione e scrive il risultato nel vettore/matrice passato. Il processo di addestramento della rete neurale può essere rappresentato visivamente utilizzando l'animazione dell'articolo "Programmazione di una rete neurale profonda da zero utilizzando il linguaggio MQL".
Miglioramenti in OpenCL
Abbiamo inoltre implementato il supporto per matrici e vettori nelle funzioni CLBufferWrite e CLBufferRead. Per queste funzioni sono disponibili i corrispondenti sovraccarichi. Di seguito è riportato un esempio per una matrice.
Scrive i valori dalla matrice al buffer e restituisce true in caso di successo.
uint CLBufferWrite( int buffer, // OpenCL buffer handle uint buffer_offset, // offset in the OpenCL buffer in bytes matrix<T> &mat // matrix of values to write to buffer );
Legge un buffer OpenCL in una matrice e restituisce true in caso di successo.
uint CLBufferRead( int buffer, // OpenCL buffer handle uint buffer_offset, // offset in the OpenCL buffer in bytes const matrix& mat, // matrix to get values from the buffer ulong rows=-1, // number of rows in the matrix ulong cols=-1 // number of columns in the matrix );
Consideriamo l'uso dei nuovi sovraccarichi con un esempio di prodotto matriciale di due matrici. Eseguiamo i calcoli utilizzando tre metodi:
- Un modo semplice per illustrare l'algoritmo di moltiplicazione delle matrici
- Il metodo MatMul integrato
- Calcolo parallelo in OpenCL
Le matrici ottenute verranno controllate utilizzando il metodo Compare, che confronta gli elementi di due matrici con la precisione indicata.
#define M 3000 // number of rows in the first matrix #define K 2000 // number of columns in the first matrix equal to the number of rows in the second one #define N 3000 // number of columns in the second matrix //+------------------------------------------------------------------+ const string clSrc= "#define N "+IntegerToString(N)+" \r\n" "#define K "+IntegerToString(K)+" \r\n" " \r\n" "__kernel void matricesMul( __global float *in1, \r\n" " __global float *in2, \r\n" " __global float *out ) \r\n" "{ \r\n" " int m = get_global_id( 0 ); \r\n" " int n = get_global_id( 1 ); \r\n" " float sum = 0.0; \r\n" " for( int k = 0; k < K; k ++ ) \r\n" " sum += in1[ m * K + k ] * in2[ k * N + n ]; \r\n" " out[ m * N + n ] = sum; \r\n" "} \r\n"; //+------------------------------------------------------------------+ //| Script program start function | //+------------------------------------------------------------------+ void OnStart() { //--- initialize the random number generator MathSrand((int)TimeCurrent()); //--- fill matrices of the given size with random values matrixf mat1(M, K, MatrixRandom) ; // first matrix matrixf mat2(K, N, MatrixRandom); // second matrix //--- calculate the product of matrices using the naive way uint start=GetTickCount(); matrixf matrix_naive=matrixf::Zeros(M, N);// here we rite the result of multiplying two matrices for(int m=0; m<M; m++) for(int k=0; k<K; k++) for(int n=0; n<N; n++) matrix_naive[m][n]+=mat1[m][k]*mat2[k][n]; uint time_naive=GetTickCount()-start; //--- calculate the product of matrices using MatMull start=GetTickCount(); matrixf matrix_matmul=mat1.MatMul(mat2); uint time_matmul=GetTickCount()-start; //--- calculate the product of matrices in OpenCL matrixf matrix_opencl=matrixf::Zeros(M, N); int cl_ctx; // context handle if((cl_ctx=CLContextCreate(CL_USE_GPU_ONLY))==INVALID_HANDLE) { Print("OpenCL not found, exit"); return; } int cl_prg; // program handle int cl_krn; // kernel handle int cl_mem_in1; // handle of the first buffer (input) int cl_mem_in2; // handle of the second buffer (input) int cl_mem_out; // handle of the third buffer (output) //--- create the program and the kernel cl_prg = CLProgramCreate(cl_ctx, clSrc); cl_krn = CLKernelCreate(cl_prg, "matricesMul"); //--- create all three buffers for the three matrices cl_mem_in1=CLBufferCreate(cl_ctx, M*K*sizeof(float), CL_MEM_READ_WRITE); cl_mem_in2=CLBufferCreate(cl_ctx, K*N*sizeof(float), CL_MEM_READ_WRITE); //--- third matrix - output cl_mem_out=CLBufferCreate(cl_ctx, M*N*sizeof(float), CL_MEM_READ_WRITE); //--- set kernel arguments CLSetKernelArgMem(cl_krn, 0, cl_mem_in1); CLSetKernelArgMem(cl_krn, 1, cl_mem_in2); CLSetKernelArgMem(cl_krn, 2, cl_mem_out); //--- write matrices to device buffers CLBufferWrite(cl_mem_in1, 0, mat1); CLBufferWrite(cl_mem_in2, 0, mat2); CLBufferWrite(cl_mem_out, 0, matrix_opencl); //--- start the OpenCL code execution time start=GetTickCount(); //--- set the task workspace parameters and execute the OpenCL program uint offs[2] = {0, 0}; uint works[2] = {M, N}; start=GetTickCount(); bool ex=CLExecute(cl_krn, 2, offs, works); //--- read the result into the matrix if(CLBufferRead(cl_mem_out, 0, matrix_opencl)) PrintFormat("Matrix [%d x %d] read ", matrix_opencl.Rows(), matrix_opencl.Cols()); else Print("CLBufferRead(cl_mem_out, 0, matrix_opencl failed. Error ",GetLastError()); uint time_opencl=GetTickCount()-start; Print("Compare computation times of the methods"); PrintFormat("Naive product time = %d ms",time_naive); PrintFormat("MatMul product time = %d ms",time_matmul); PrintFormat("OpenCl product time = %d ms",time_opencl); //--- release all OpenCL contexts CLFreeAll(cl_ctx, cl_prg, cl_krn, cl_mem_in1, cl_mem_in2, cl_mem_out); //--- compare all obtained result matrices with each other Print("How many discrepancy errors between result matrices?"); ulong errors=matrix_naive.Compare(matrix_matmul,(float)1e-12); Print("matrix_direct.Compare(matrix_matmul,1e-12)=",errors); errors=matrix_matmul.Compare(matrix_opencl,float(1e-12)); Print("matrix_matmul.Compare(matrix_opencl,1e-12)=",errors); /* Result: Matrix [3000 x 3000] read Compare computation times of the methods Naive product time = 54750 ms MatMul product time = 4578 ms OpenCl product time = 922 ms How many discrepancy errors between result matrices? matrix_direct.Compare(matrix_matmul,1e-12)=0 matrix_matmul.Compare(matrix_opencl,1e-12)=0 */ } //+------------------------------------------------------------------+ //| Fills the matrix with random values | //+------------------------------------------------------------------+ void MatrixRandom(matrixf& m) { for(ulong r=0; r<m.Rows(); r++) { for(ulong c=0; c<m.Cols(); c++) { m[r][c]=(float)((MathRand()-16383.5)/32767.); } } } //+------------------------------------------------------------------+ //| Release all OpenCL contexts | //+------------------------------------------------------------------+ void CLFreeAll(int cl_ctx, int cl_prg, int cl_krn, int cl_mem_in1, int cl_mem_in2, int cl_mem_out) { //--- release all created OpenCL contexts in reverse order CLBufferFree(cl_mem_in1); CLBufferFree(cl_mem_in2); CLBufferFree(cl_mem_out); CLKernelFree(cl_krn); CLProgramFree(cl_prg); CLContextFree(cl_ctx); }
Una spiegazione dettagliata del codice OpenCL di questo esempio è fornito nell'articolo “OpenCL: Da semplice verso una programmazione più perspicace”.
Ulteriori miglioramenti
Build 3390 ha eliminato due restrizioni nel funzionamento di OpenCL che influivano sull'utilizzo della GPU.
Per impostare l'uso obbligatorio di GPU con supporto doppio per compiti specifici, utilizzare CL_USE_GPU_DOUBLE_ONLY nella chiamata CLContextCreate.
int cl_ctx; //--- initialization of OpenCL context if((cl_ctx=CLContextCreate(CL_USE_GPU_DOUBLE_ONLY))==INVALID_HANDLE) { Print("OpenCL not found"); return; }
Sebbene le modifiche alle operazioni OpenCL non siano direttamente correlate a matrici e vettori, sono in linea con i nostri sforzi nello sviluppo delle capacità di apprendimento automatico del linguaggio MQL5.
Il futuro di MQL5 nell'Apprendimento Automatico
Negli ultimi anni abbiamo fatto molto per introdurre tecnologie avanzate nel linguaggio MQL5:
- Convertendo la libreria di metodi numerici ALGLIB a MQL5
- Implementando una libreria matematica con logica fuzzy e metodi statistici
- Introducendo la libreria grafica, analoga della funzione plot
- Integrando con Python, per eseguire script Python direttamente nel terminale
- Aggiungendo funzioni DirectX per creare grafica 3D
- Implementando supporto nativo per SQLite per le operazioni con i database
- Aggiungendo nuovi tipi di dati: matrici e vettori, con tutti i metodi necessari.
Il linguaggio MQL5 continuerà a svilupparsi, mentre una delle principali priorità è l'apprendimento automatico. Abbiamo grandi progetti di sviluppo. Quindi, restate con noi, sosteneteci e continuate ad imparare con noi.